Taxi¶
Taxi guidance is used to create a linear path along the runway that is followed by the aircraft. This command is normally used in the take-off phase, where the airplane is wanted to keep the direction of the runway while is accelerating until the lift-off point.
TAXI Guidance
Set height mode: the height mode indicates how the aircraft will perform the route. Height mode in Taxi guidance is fixed to 2.5D type. This means that vertical flight is not allowed, so horizontal guidance has priority over vertical guidance.
Arcade position/speed transition In Arcade mode the trajectory generated (position) is not followed and instead the aircraft moves according to the commanded speed. The horizontal and vertical speed parameters serve as the upper-thresholds for when the aircraft’s guidance should be position-based, even in Arcade mode. This parameters are mainly useful for platforms like multicopters.
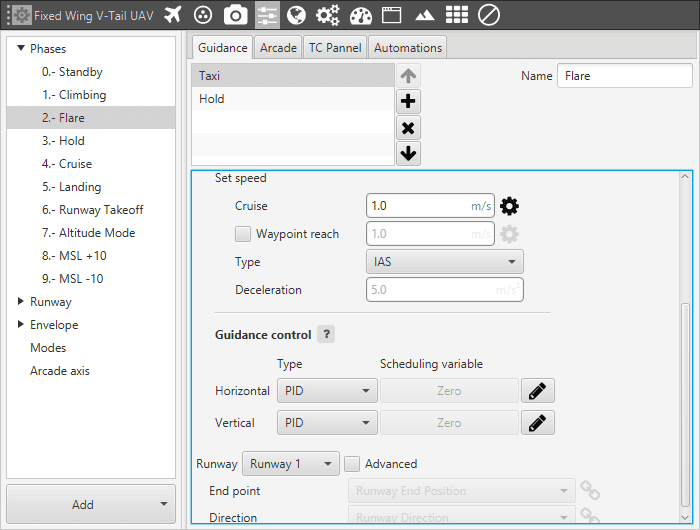
Set speed: this option sets the speed that the vehicle will have during this phase. It can be IAS (indicated airspeed) or Speed (Ground Speed). Normally, IAS is used for airplanes and Speed for multicopters. The option Waypoint reach is used to indicate the speed at which the platform will reach the waypoints, so it will travel along the path with the speed indicated in the option Cruise, then it will decelerate or accelerate to the speed indicated in Waypoint Reach and then it will go back to the cruise speed.
Guidance control: vertical and horizontal PIDs (with constants gains or variable that control this phase (see Blocks).
Runway: here it is selected a runway previously configured, see section Runway. Besides, it is possible to use the advanced mode and select a different end point or direction.