System Layout¶
The following image shows the standard Veronte System Layout for operation:
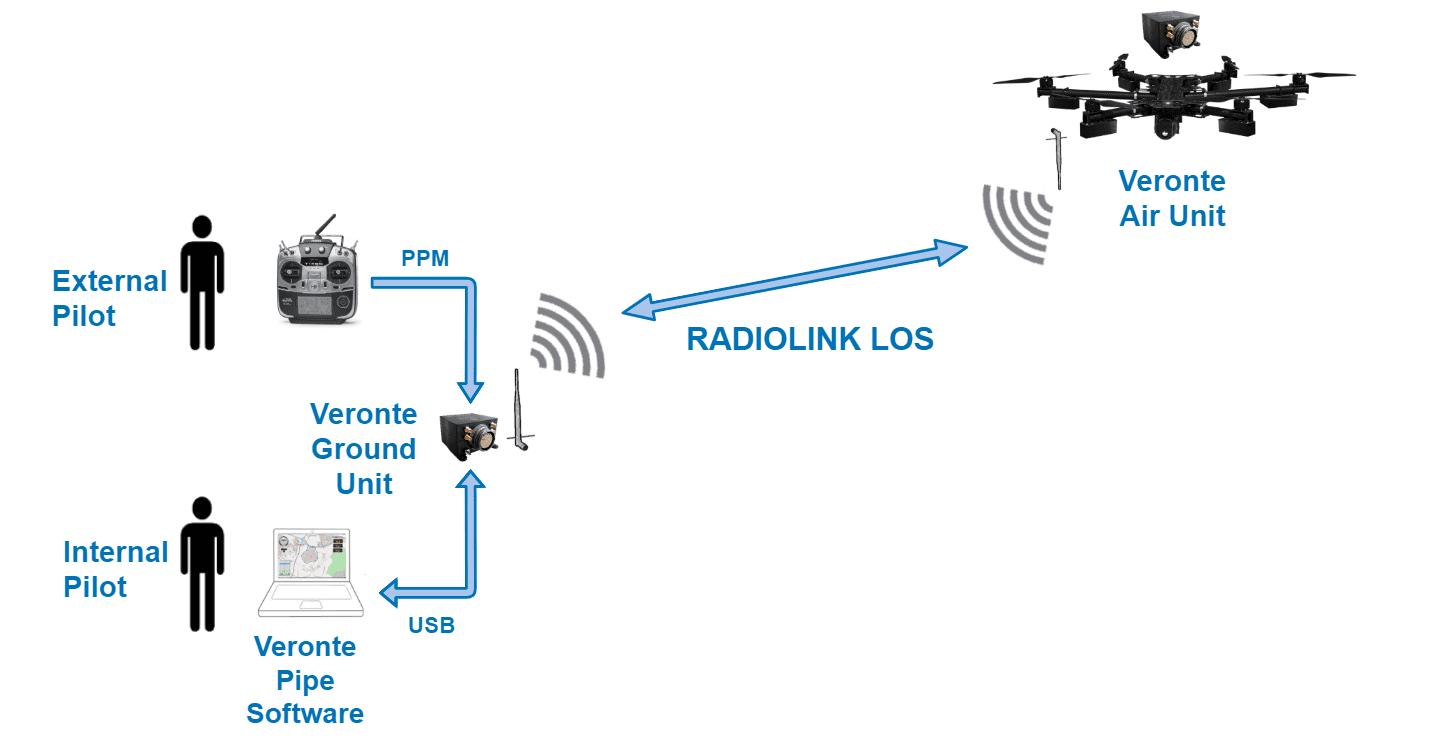
Veronte Standard Layout
In the standard layout, an Operator (Internal Pilot) controls the UAV from the Ground Station using Veronte Pipe Software.
Additionally, a Safety Pilot (External Pilot) is connected to the Ground Station using an RC Controller. The stick commands are read by the Ground Unit and re-routed to the Air Unit. The Safety Pilot is able to take control of the flight at any point using an Automation
While this is the most common setup, there is a wide variety of options, including:
BLOS (Beyond Line-of-sight) communications
Onboard RC receivers
Point-to-Multipoint configurations