CAN Telemetry¶
On the custom message tabs, the user chooses the variables to be sent/received over the CAN buses. The following elements can be configured:
TX Ini: used to configure transmitted messages that are only sent once at the beginning of the operation (sent when the autopilot boots up). They can be used to initialize some devices.
TX: used to configure transmitted messages.
RX: used to configure the reception messages (where they are stored).
CAN – Telemetry
TX Messages¶
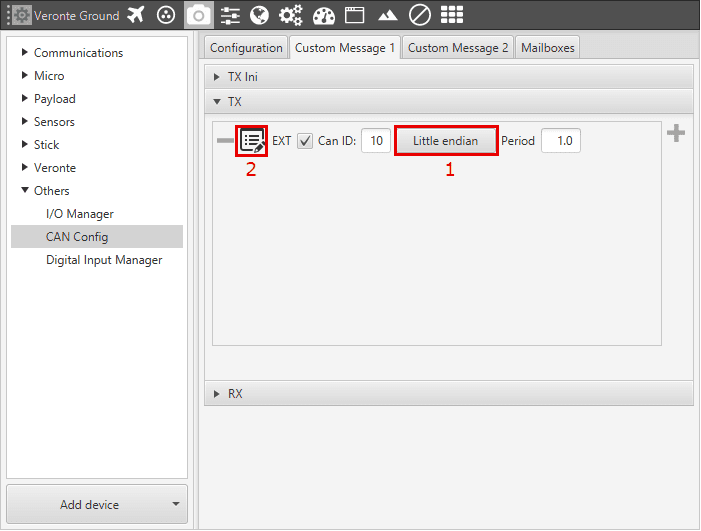
CAN – Telemetry - TX
In order to add a new custom message the user needs to press “+” and a new element will be added into the panel.
EXT: enables the frame format with a 29-bit identifier.
ID: 11 or 29-bits (Extended) ID used to identify TX messages. The value set has to be decimal format.
Period: time in seconds between TX messages delivery.
Button 1: open a new window to configure the endianness of the message, which indicates how the bytes that it contains are sent/read:
Big endian: set the value from left to right
Little endian: set the value from right to left
Mixed endian: custom endiannes.
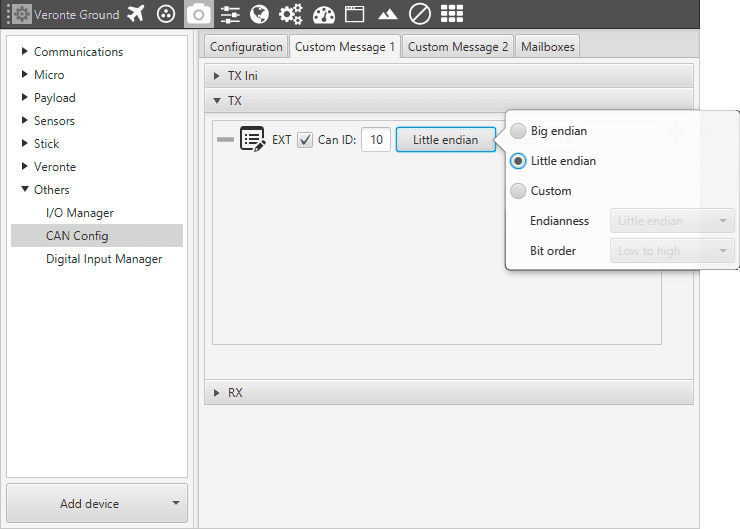
CAN – Telemetry – TX Endianess
Button 2: displays the menu to configure how the bits/bytes of the message are divided and sent.
There are six different elements that can be added when setting up a custom message: Variable, Checksum, Matcher, Skip, Parce Ascii and Position. This is covered in section Custom Messages.
The maximum capacity of a CAN message is 64 bits (8 bytes), so to send more information it must be divided into several messages.
RX Messages¶
The procedure is similar to the one followed in TX messages.
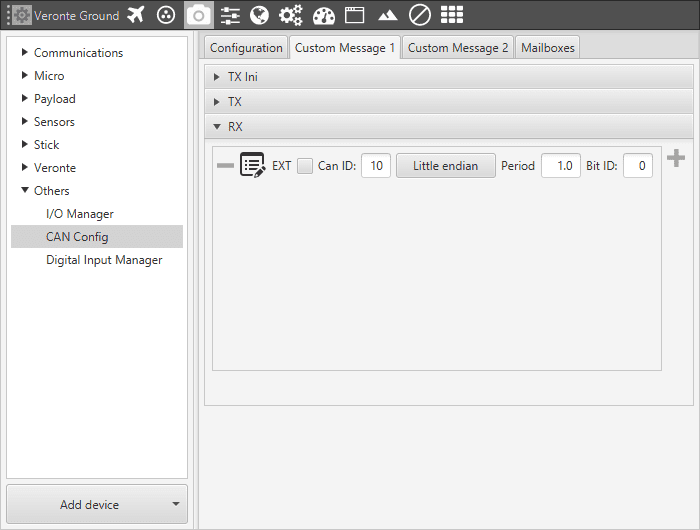
CAN – Telemetry - RX
The custom message needs to have the expected ID with which the external device/sensor is going to be sending information.
Attention
It is important to configure a mailbox for every single reception ID. See Mailboxes for more information.
The custom message structure needs to match the reception data-format. User variables (real - 32 bits , integer - 16 bits or boolean - 1 bit) need to be used to store that data.
Unlike TX messages there are two additional variables per message, Bit ID and Period. The user bit selected in Bit ID box will be true if the message is being received correctly. Period is the time between receptions to consider that it is not being received correctly. For example, if period is set to 1s and it passes more than 1s since the last reception, the bit ID will be set to false.
Warning
Pay attention that the user bit selected in Bit ID is not in use for another task.