Yaw¶
Yaw guidance is used in multicopters to indicate the behaviour of the platform in the yaw axis. This option is normally used during the cruise phase of the multicopters, because the route can be carried out with the aircraft without rotating in the yaw axis, or rotate it to point its longitudinal axis parelel to the path.
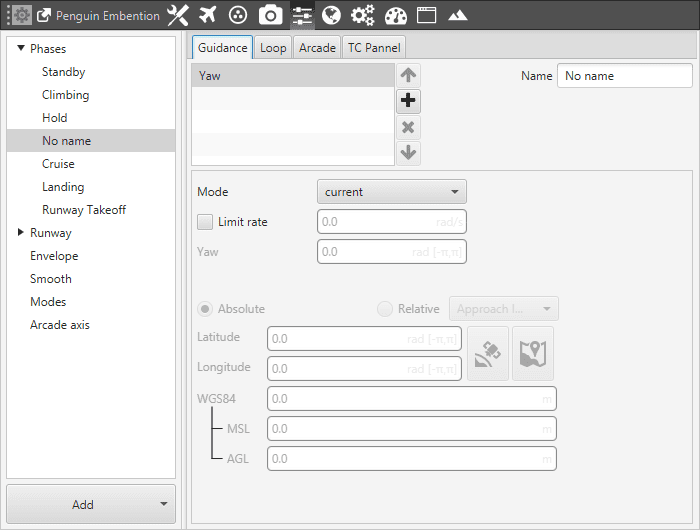
Yaw Guidance
The modes available in the yaw guidance are:
Current: the multicopter will keep the yaw angle it has when entering in the phase that contains this guidance. Desired Yaw = Current Yaw
Fixed: the yaw is kept at a constant value indicated by the user.
Heading: Heading represents velocity vector direction and, when it is very small, its estimation is more complex and direction is changing constantly. Because of this, the approximation Yaw = Heading is introduced when the estimated velocity is near 0.
Position: the yaw of the multicopter will be rotated so its longitudinal axis is always focusing a point defined by the user in the menu shown in the previous figure (absolute or relative).