Rendezvous¶
Rendezvous guidance is used to create a meeting point where the Air unit will approach a second unit (either Air or Ground) within a determined offset. This guidance updates constantly the vehicle attitude in order to track, with the shortest path, the position of the second unit (named as Ground hereafter). This guidance works for both static and moving Ground. Rendezvous navigation is ready for taking Internest input to improve the precision from its guidance, being the most suitable kind for Internest integration.
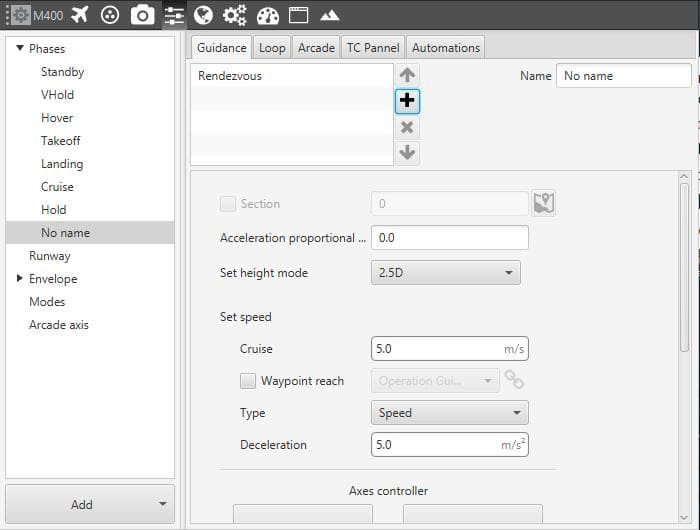
Rendezvous Guidance – Menu 1
Acceleration proportional gain: this parameter is related with a new control system that Embention is developing in which elevator and thurst work side by side in both the pitching and thrusting.
Set height mode: the height mode indicates how the aircraft will perform the route.
2D mode: if this mode it is selected, the platform will follow the predefined route without taking into account the altitude of the waypoints, it will keep the altitude that it has at the moment it enters in this guidance.
2.5D mode: is used in multicopters only, in this case, the vehicle will climb vertically to the altitude of the first point of the route and then it will begin it.
3D mode: the vehicle goes from the altitude at which it enters in this mode, to the beginning of the route in a diagonal trajectory (it follows a 3D trajectory that connects the two points).
Set speed: this option sets the speed that the vehicle will have during the phase. It could be IAS (indicated airspeed) or Speed (Ground Speed). Normally, the IAS is used for airplanes and the Speed for multicopters. The option Waypoint reach is used to indicate the speed at which the platform will reach the waypoints, so it will travel along the path with the speed indicated in the option Cruise, then it will decelerate or accelerate to the speed indicated in Waypoint Reach and then it will go back to the cruise speed.
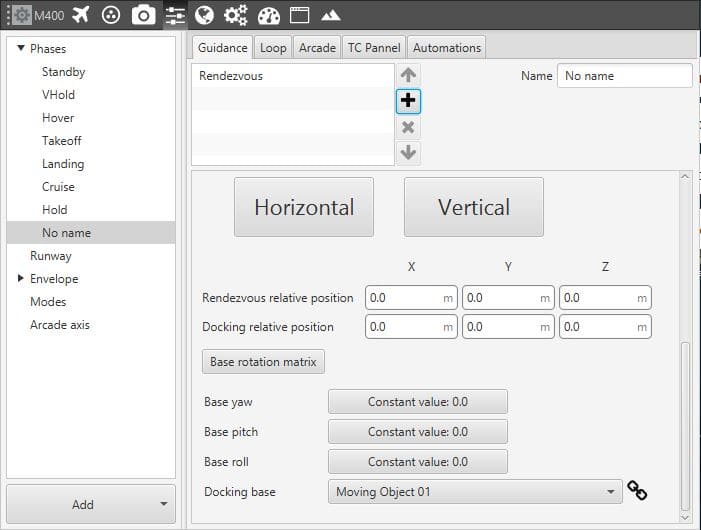
Rendezvous Guidance – Menu 2
Axes Controller (Horizontal and Vertical): configuration of the PIDs from the system for both axes.
Docking base: defines the position of the GNSS antenna connected to Veronte Ground.
Base yaw, pitch & roll: defines the attitude from the base body. These values affect the navigation by orienting the Air unit to be equal to the attitude from the Ground one. To be configured with telemetry (example below).
In order to configure the Moving Object which is assigned to Docking Base and the Base attitude, the next procedure must be followed.

Ground Telemetry
In the Ground unit, go to Variables Telemetry – Data link to Veronte and add the variables Absolute: UAV position, Yaw, Pitch & Roll. A recommended frequency is 10 Hz. On address, point to the Air Unit (it is needed to have both units connected through the radio in order to be able to see them on the menu).
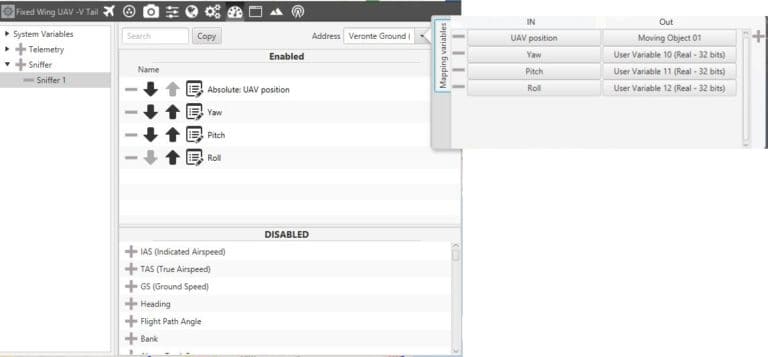
Air Sniffer
For the Air unit, go to Sniffer – Add a new Sniffer and configure the same Variables (keeping the same order) than in the Ground unit (in this case Absolute: UAV position, Yaw, Pitch & Roll). Address the Ground unit and in the gear next to it, configure the 4 incoming variables as System Variables. Assign UAV Position to Moving Object and the 3 variables from attitude to 3 different User Variables (keeping the same order as well).
In order to be able to see the Moving Object position in Pipe interface, go to Air unit configuration ref Variables – Telemetry – Data Link to Pipe and add Moving Object to the list of variables.
Docking relative position: 3D point used to configure the offset for the approaching vehicle to the Docking base. This will be the difference from GNSS position that defines the landing point.
Rendezvous relative position: 3D point used to configure the meeting point for the Air Veronte. This point will be tracked by the vehicle and, once reached, it will start travelling to Docking relative position. For VTOL, X and Y components must be equal. For both Docking and Rendezvous the axes are set according to Veronte orientation.