TC Panel¶
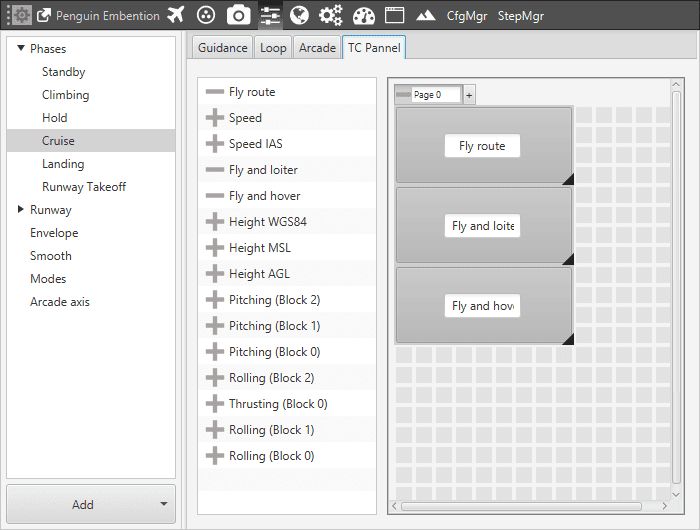
This menu sets the variables that will be accessible during the flight from the Veronte Panel. Considering as an example a typical navigation phase, the parameters that can be changed from the TC Panel appear in the following figure.
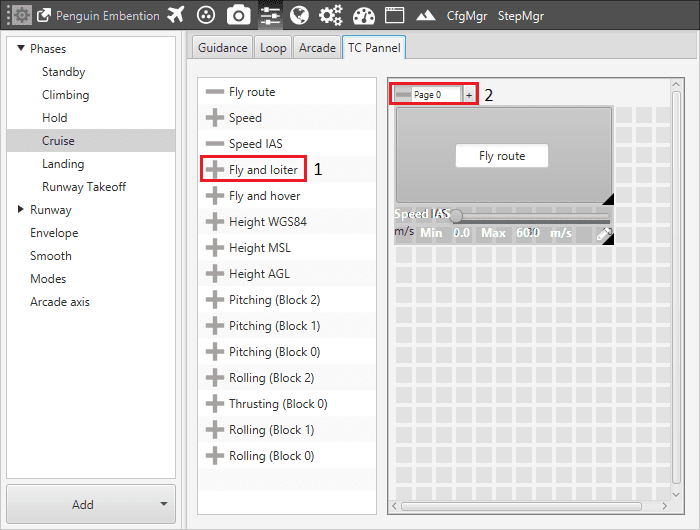
TC Panel
Number 1 is the button used to add a variable to the TC Panel of a phase (the “-” button is used to remove an element).
Number 2 indicates the TC Panel page where the current element is being added. Pipe allows user to set more than one page in order to arrange all the variables in an easily accessible way.
PID Gains¶
The parameters that are used the most for the TC Panel are the gains of the PID controller, because that provides the operator with an easy way to adjust the gains on a real flight. Each control configured in the Loop Panel will be shown on the TC Panel.
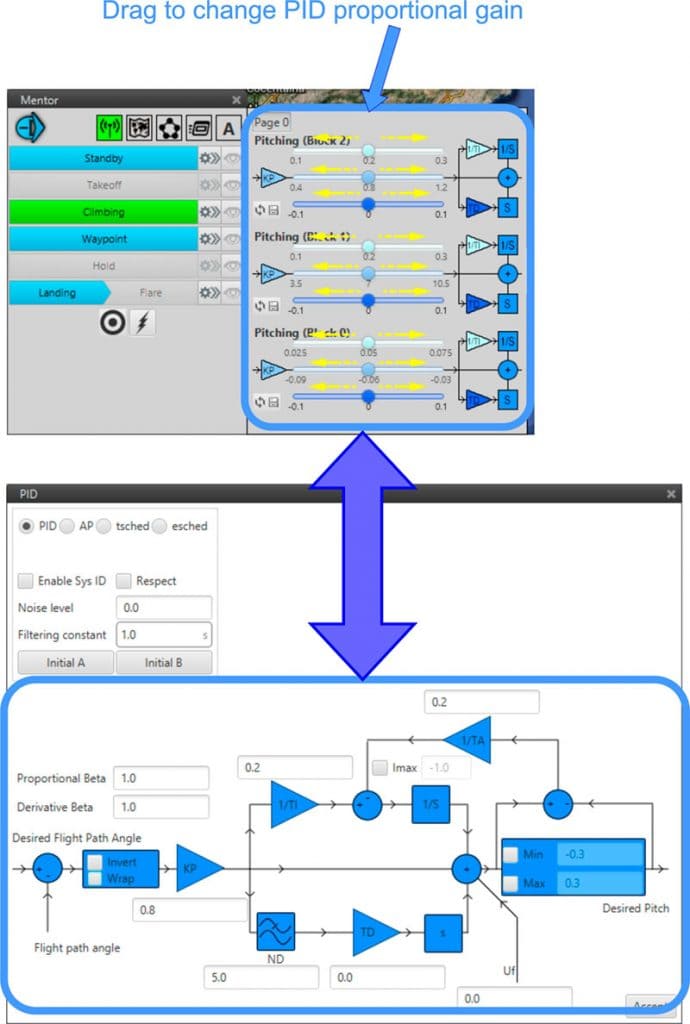
Set PID Parameters
Cruise Guidance¶
In addition, if the Guidance of the phase is Cruise, the TC Panel can also hold the option of creating different types of interactions with the UAV:
Desired variable change: Speed, Speed IAS, Height AGL, Height MSL, Height WGS 84.
Route: Fly route, Fly and loiter, Fly and hover and Follow Leader.
The variable changing allows the user to modify the desired variable in real time during the flight. In the configuration of the TC Panel, a maximum and a minimum of the variable has to be set (red box).
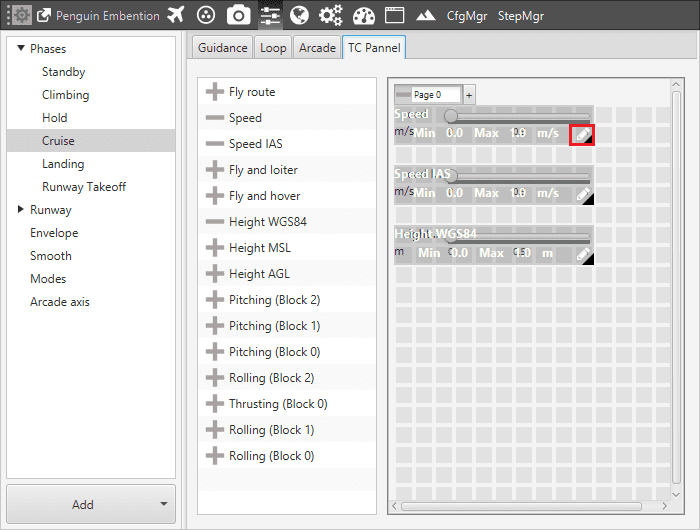
TC Panel variables change set
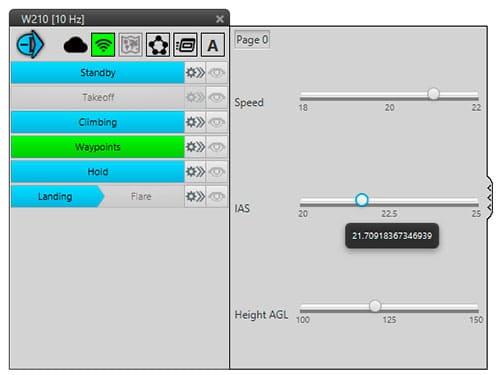
TC Panel during Waypoint phase (Variables)
The route tools can be used when the user wants to change the actual route:
Fly route: the platform will create a new route to reach the selected waypoint.
Fly and loiter: the platform (Plane) will create a new route to reach the selected point and start loitering. In order to set the loiter radius it is necessary to click and maintain to enlarge or reduce the circle.
Fly and hover: the platform (Multicopter) will create a new route to reach the selected point and start hovering.
Follow liader: the platform (Multicopter) will follow an moving object.
TC Panel routes change set

TC Panel during Waypoint phase (Routes)

Fly and loiter example