Hold¶
Hold guidance is used to introduce in the control system a desired variable with a certain value especified by the user. It is different than the other guidances, where for example the user determines a path to follow and the desired heading that makes the aircraft follow that path is not determined by the user, is determined by the path.
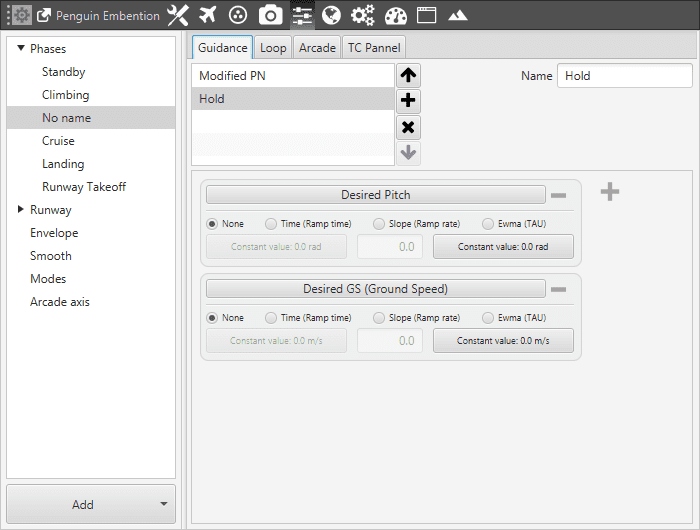
Hold Guidance
There are 4 ways in Pipe to determine how the variable is introduced in the controller in a Hold Guidance.
None: a simple value is specified. As soon as the aircraft enters in the phase that has this hold guidance, the desired variable will take the value specified in this option. It is possible to define a constant value for the desired variable, or take the value that another variable has at the instant when the aircraft enters in that phase. For example, to make the aircraft keep the heading that it has when changing to a phase, select Desired Heading as the hold variable, and choosing heading.
Time (Ramp Time): in this case, the desired variable introduced in the controller will take first the value (or the variable) introduced. After a certain time established, the variable reached the value (or variable) indicated.
Slope (Ramp Rate): the same case as before, but know instead of the time between the two values of the ramp, the slope of that ramp can be indicated.
Ewma (TAU): the variation between the start and final points is exponential.