Taxi¶
Taxi guidance is used to create a linear path along the runway that is followed by the aircraft. This command is normally used in the take-off phase, where the airplane is wanted to keep the direction of the runway while is accelerating until the lift-off point.
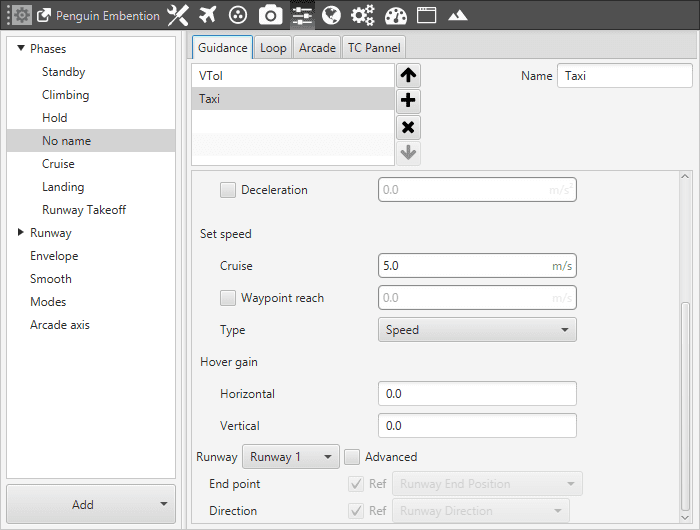
TAXI Guidance
Line attraction: is a parameter that determines how the platform is attracted to the line that determines the path that has to follow. The value is the distance perpendicular to the path at which the vehicle will try to go back to the line with a heading of 45 degrees with respect to it. When it is closer than this distance the heading angle is lower, and bigger when the distance is higher. So a small value will make the aircraft go to the line at high angles during more time (because the distance of 45 degrees is now small), and a big value implies less attraction because the platform will go to the line at smaller angles than 45 degrees from a bigger distance.
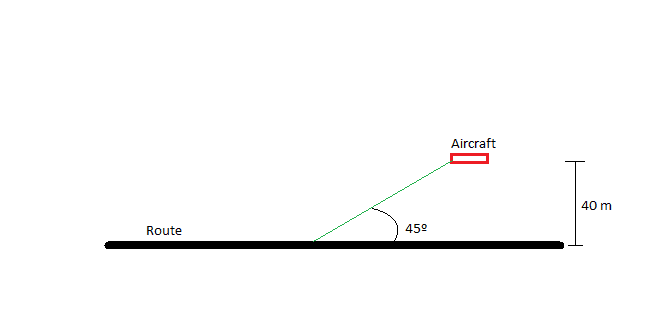
Angle and distance
In this phase the path is not directly indicated by the user as in the Cruise (which is defined in the Mission menu) but there is still a trajectory whose parameters are detalied later in this section, so this value is as important as it is for the Waypoint following route. The common values of the line attraction are between 20 and 40 for airplanes, and 15 for multicopters. This parameter only has to be changed by advanced users.
Acceleration proportional gain: this parameters is releated with a new control system that Embention is developing in which elevator and thurst work side by side in both the pitching and thrusting.
Set height mode: the height mode indicates how the aircraft will perform the route.
2D mode: if this mode it is selected, the platform will follow the predifined route without taking into account the altitude of the waypoints, it will keep the altitude that it has at the moment it enters in the cruise guidance.
2.5D mode: the vehicle goes from the altitude at which it enters in the mode, to the beginning of the route in a diagonal trajectory (it follows a 3D trajectory that connects the two points).
3D mode: is used in multicopters only, in this case the vehicle will climb vertically to the altitude of the first point of the route and then it will begin it.
Set limit acceleration: establish a limit for acceleration and deceleration.
Set speed: this option sets the speed that the vehicle will have during this phase. It can be IAS (indicated airspeed) or Speed (Ground Speed). Normally, IAS is used for airplanes and Speed for multicopters. The option Waypoint reach is used to indicate the speed at which the platform will reach the waypoints, so it will travel along the path with the speed indicated in the option Cruise, then it will decelerate or accelerate to the speed indicated in Waypoint Reach and then it will go back to the cruise speed.
Runway: here it is seleceted a runway previously configured, see section Runway. Besides, it is possible to use the advanced mode and select a different end point or direction.