VTOL¶
VTOL guidance (vertical take-off and landing) is used in multicopters for the take-off and landing operations. This guidance consists on the creation of a vertical line that starts at the point where the platform enters in this guidance.
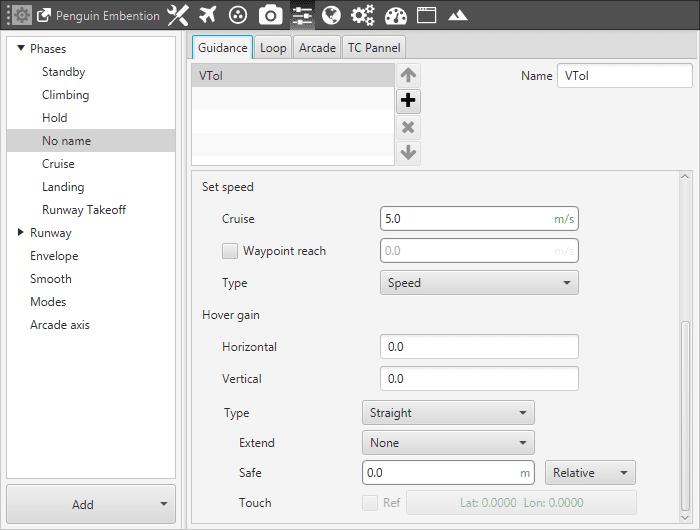
VTOL Guidance
Line Attraction: is a parameter that determines how the platform is attracted to the line that determines the path that has to follow. The value is the distance perpendicular to the path at which the vehicle will try to go back to the line with a heading of 45 degrees with respect to it. When it is closer than this distance the heading angle is lower, and bigger when the distance is higher. So a small value will make the aircraft go to the line at high angles during more time (because the distance of 45 degrees is now small), and a big value implies less attraction because the platform will go to the line at smaller angles than 45 degrees from a bigger distance.
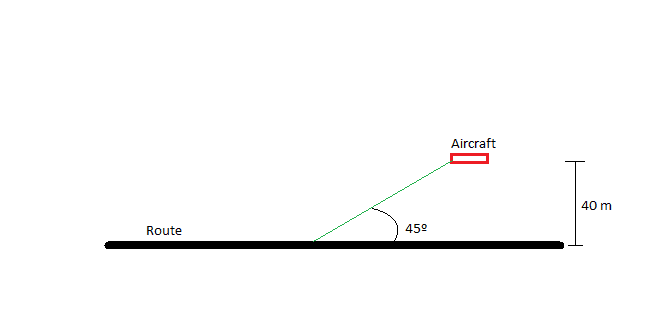
Angle and distance
In this phase the path is not directly indicated by the user as in the cruise (which is defined in the Mission menu) but there is still a trajectory whose parameters are detalied later in this section, so this value is as important as it is for the Waypoint following route. The common values of the line attraction are between 20 and 40 for airplanes, and 15 for multicopters. This parameter only has to be changed by advanced users.
Acceleration proportional gain: this parameters is releated with a new control system that Embention is developing in which elevator and thurst work side by side in both the pitching and thrusting.
Set height mode: the height mode indicates how the aircraft will perform the route.
2D mode: if this mode it is selected, the platform will follow the predifined route without taking into account the altitude of the waypoints, it will keep the altitude that it has at the moment it enters in the cruise guidance.
2.5D mode: the vehicle goes from the altitude at which it enters in this mode, to the beginning of the route in a diagonal trajectory (it follows a 3D trajectory that connects the two points).
3D mode: is used in multicopters only, in this case the vehicle will climb vertically to the altitude of the first point of the route and then it will begin it.
Set limit acceleration: limit the values of the acceleration and deceleration during this guidance.
Set Speed: this option sets the speed that the vehicle will have during this guidance. It could be IAS (indicated airspeed) or Speed (Ground Speed). Normally, the IAS is used for airplanes and the Speed for multicopters. The option Waypoint reach is used to indicate the speed at which the platform will reach the waypoints, so it will travel along the path with the speed indicated in the option Cruise, then it will decelerate or accelerate to the speed indicated in Waypoint Reach and then it will go back to the cruise speed.
Hover Gain: those gains are used by a multicopter when it is hovering over a certain location. When the vehicle is moved from that hover point because of a wind gust, it will try to go back to that location using the gains specified here.
Type: this parameters are used to indicate the route followed by the multicoter during the take-off and landing. The path Straight consists on a vertical line from the point where the vehicle enters in this phase. In the case of a take-off, the line goes from the ground to an altitude indicated by the user. The second option, Hangman, the path consists on a vertical and horizontal line.
Extend: when Up or Down are selected, the value set in Safe will be discard, and the platform will ascend or descend, until a next change.
Safe: this parameter defines the altitude the aircraft reach, it can be Relative (starting from the initial point of the route – current platform position) or an Absolute altitude (MSL,AGL or WGS84). As an example, in a take-off operation, an altitude of -10000 meters can be indicated as the final point of the route, so it is sure that the multicopter will keep climbing until another phase is commended (via automation or manually). The same procedure is done in the landing, indicating a big relative distance (for example 100 meters from the starting point) so it is sure that the vehicle reaches the ground, and an automation is set to stop the platform when it touches the surface.
Touch: additional parameter to be configured when the type Hangman is selected. It defines a point that the aircraft has to reach. For instance, after go Up/Down the value set, the aircraft will perform an horizontal movement according to the point defined. Finally, when the aircraft is over the point, it will descend till reach that point. Usually, this option is used when there are obstacles in the area and performing this movement the platform can avoid them and landing safety.
Note: when the option relative is selected, a positive value will made the aircraft descend. Therefore, this value is Positive down.
The following image gives an overview of some parameters introduced:
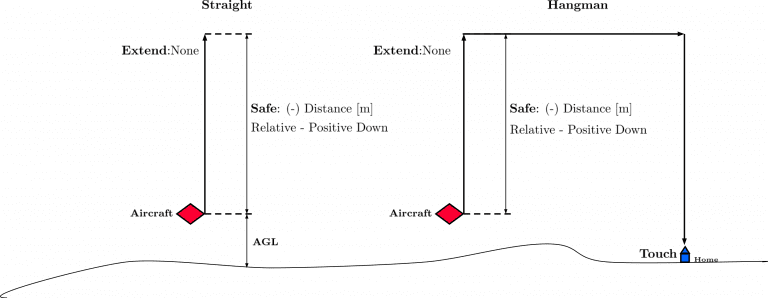
Parameters Overview