 Control¶
Control¶
In this panel all the parameters related to the control of the platform can be found.
Phases¶
This section creates (it defines but does not configures) the flight phases that will control the aircraft at different stages of the operation.
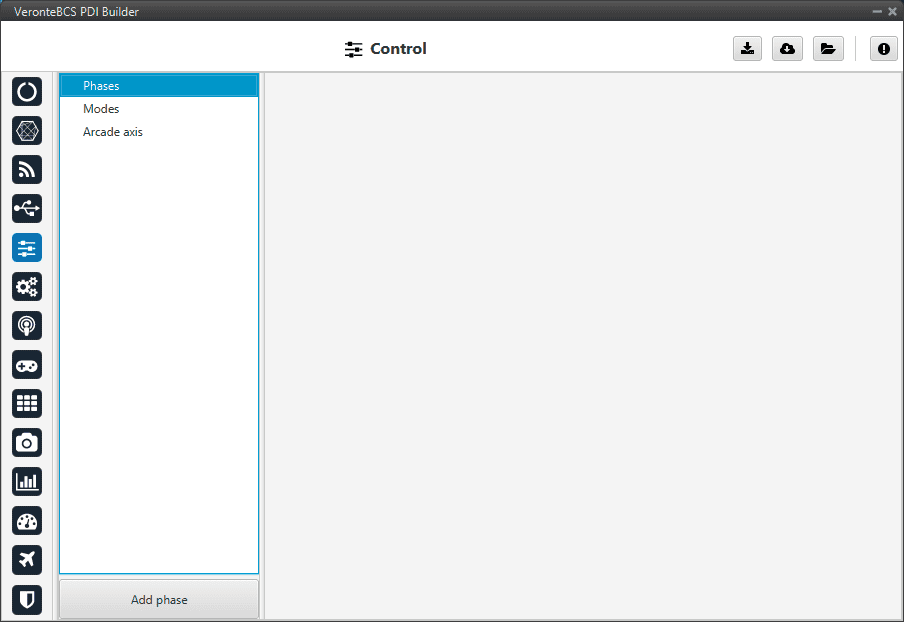
Phases menu¶
To create a new phase click on Add phase, the user can then select a phase already created or create a new one.
Create phase¶
In addition, by right clicking on the phase, the user can rename, copy or remove it:
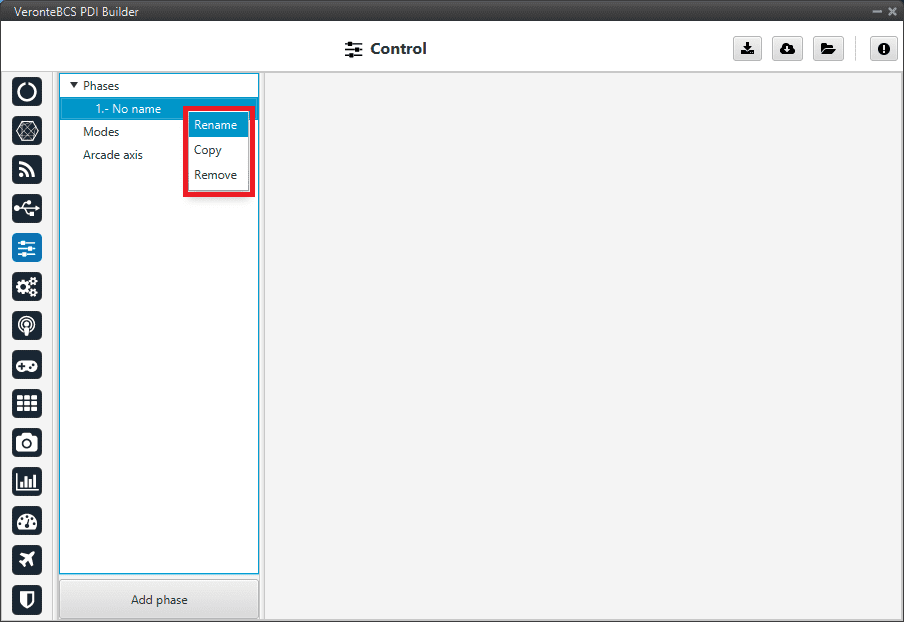
Phase options¶
Note
The configuration of the phases (guidance and control commands) is done in the Block Programs section.
Modes¶
Modes
This menu allows the creation of custom flight modes. The flight modes determine who is in charge of controlling each one of the aircraft control channels.
There are 4 different control modes and it is possible to combine them to create custom flight modes.
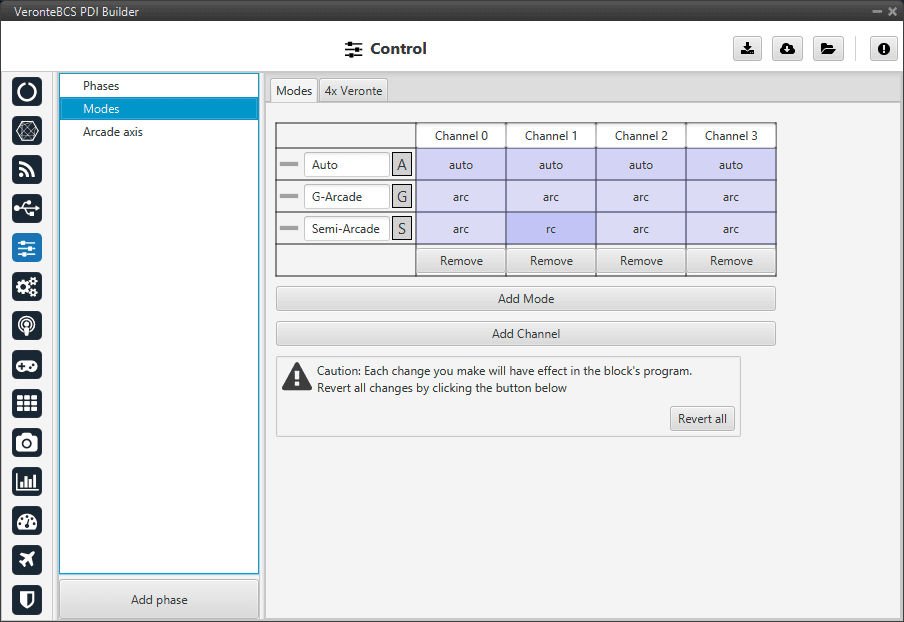
Modes menu¶
The options available are:
auto: The control channel is controlled totally by the autopilot.
rc: The control is totally carried out manually. The movements on the pilot stick imply directly movements on the servo linked to that control channel.
arc: The autopilot aids the radio controller during the flight, i.e it could be considered as a mix between automatic and manual. The movements on the pilot stick are the input values on the control system, so the pilot commands a desired pitch, roll, IAS, heading and so on, and is the control system who is in charge of making the platform follow those commands.
mix: In this mode, it is possible to select in which step of the controller will enter the pilot command.
Example
For example, the pitching of an aircraft is commonly controlled with 3 PID being: flight path angle, pitch and pitch rate. In the arcade mode the pilot command will be a desired flight path angle that enters as input of the whole control system, but in the Mix mode is possible to select where we want the command to enter, so the pilot command could be pitch (entering in the second PID directly) or pitch rate (entering directly on the third PID).
The control system will take this input as a disturbance that it wants to discard because the final objective is to match the input of the first PID (a desired flight path angle in this case), so the Mix mode can be used to make small corrections when the aircraft is following a route for example, where we want it to move slightly towards a certain direction by introducing a value directly on the roll PID.
To change any of this options, click on the cell the user would like to change and the next option will be set.
Warning
The name of the mode does not have to correspond to the configuration of the mode.
For example, the user can name the mode as Auto but set the channels as rc (manual):
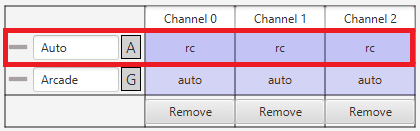
Modes configuration¶
Moreover, although the mode is set “sensefully” here, in the block configuration (Block Programs) the control does not have to correspond to this.
For example, if a channel is configured as manual (rc) here but then the control is configured so that the stick input does not control the channel, it will be auto control even though manual is specified. See the following example, where for consistency, the blocks in the ‘True’ and ‘False’ cases should be inverted:
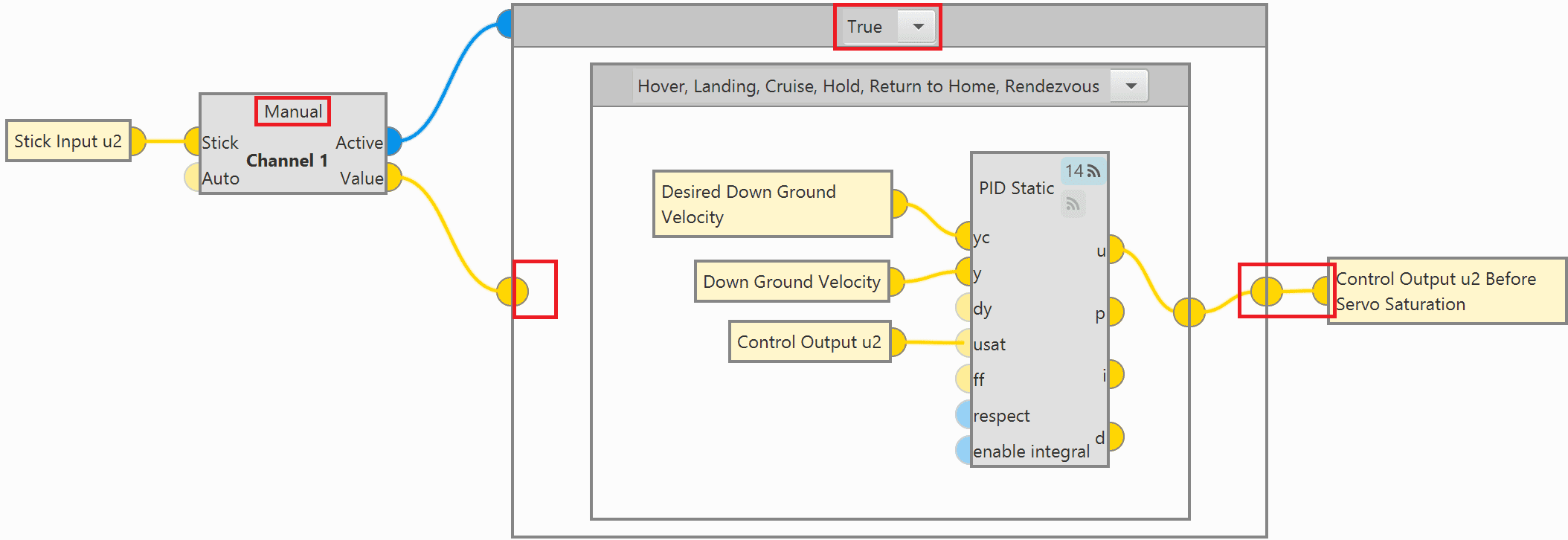
Modes configuration in blocks¶
So, it is the user’s responsibility to build the configuration correctly. In case of having any questions, the user should contact the support team (create a ticket in the customer’s Joint Collaboration Framework; for more information, see Tickets section of the JCF manual).
4x Veronte
This tab allows the user to configure the BCS to operate in an Autopilot 4x.
By adding the arbiter address, Veronte Ops will recognise it as part of a 4x group, and it will also be possible to do HIL simulations (with Veronte HIL Simulator) with this 4x.
Note
If the arbiter address is set to 999, there is no arbiter.
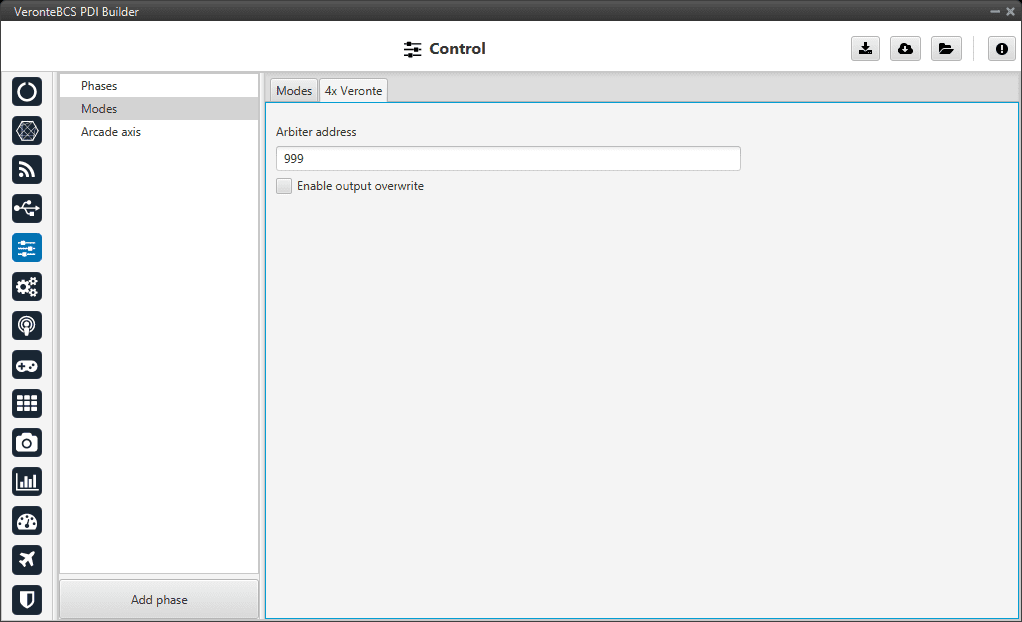
4x Veronte tab¶
To allow the output to be overwritten, the checkbox must be checked.
By enabling it, a table can be created in which columns correspond to each 1x Autopilot and the CanID row to the ID of the CAN message through which each Autopilot 1x communicates information with the other Autopilots 1x within the Veronte Autopilot 4x. Each CAN Id is associated to the CAN 4x producer/consumer of the AP in which it is configured. For more information on CAN 4x, see the CAN Setup section of this manual.
This option must work in conjunction with the AP Selection block.
Arcade axis¶
The Arcade Axis menu enables the option to change the center of the system axes. This option is used to create axis systems referred to a certain point or direction, for example, it is useful when the pilot wants to define all movement respect it (Ground axes). In this way, if the pilot command a turn right, the aircraft will turn to the right of the pilot, instead the right of the aircraft (Body axes).
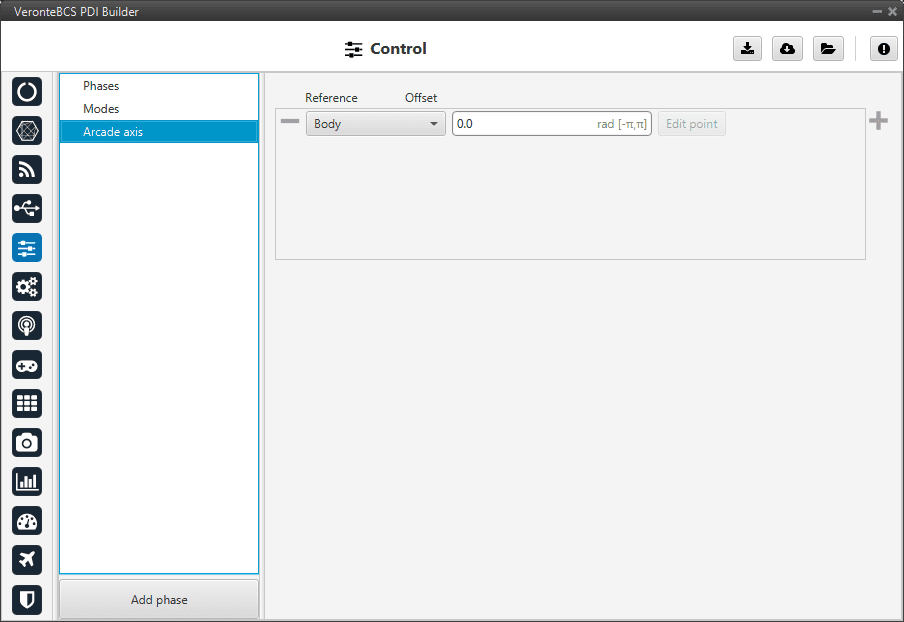
Arcade axis menu¶
It is possible to add as many axes system as desired, being able to choose between the following types:
Body: Fix the axes in the UAV. It is standard for the pilot.
Ground: Fix the axes in the 1x GND unit.
Point: Fix the axes in a point that user defines.
Heading: Fix the axes in the the heading defined.
Desired heading: Fix the axes in the desired heading.
Tangent direction: Fix the axes in the tangent direction of the designed path.
Desired yaw: Fix the axes in the desired yaw.
An automation can be used to select an Arcade Axis in flight, see Actions in Automations section.