Obstacles¶

Obstacle Tool
Obstacle
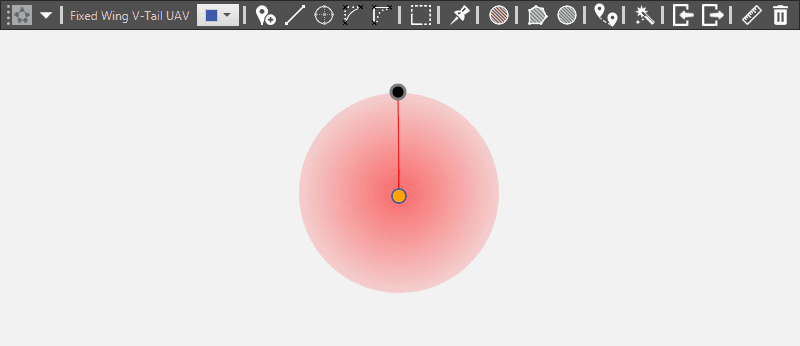
This tool permits to set an exclusion area on the map that can not be crossed by the RPAS. To change the area position, drag its central waypoint to the desired position. The radius can be extended or contracted directly by dragging the point in its circumference. It is also possible to set the coordinates of the central waypoint by double-clicking on it.
Main functions of the tool:
Avoid collisions with obstacles as for example buildings, trees or antenna towers.
Avoid flying restricted access areas.
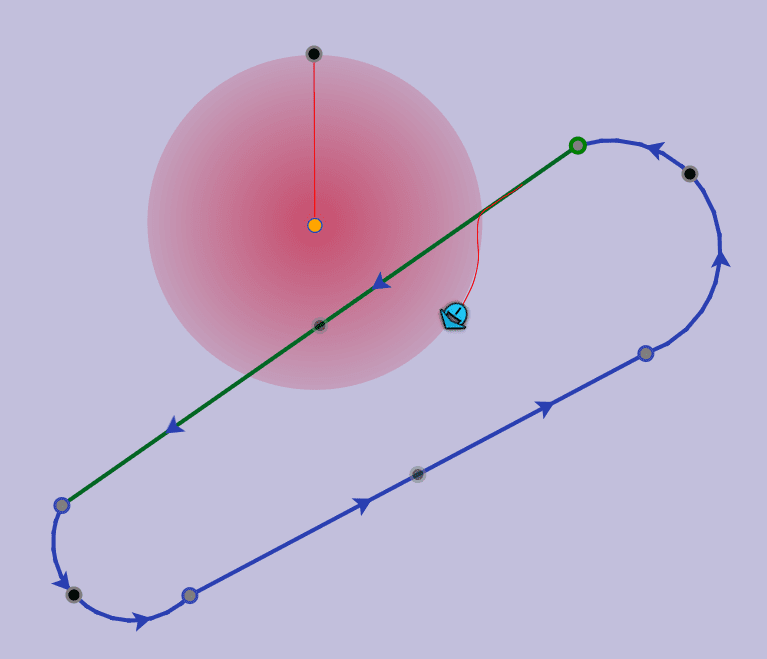
This area is a repulsion potential field for the aircraft, so depending on the moving speed, the plane will cross the black line (high speed) or it will remain completely out of the red zone.
Obstacle avoidance
What can happen with high speed aircrafts (Airplanes) ? Its possible that because their velocity, the RPAS will sign in the obstacle area, but immediately it will apply the corrections to leave of the obstacle area and return to the path. The solutions for this problem its configure a bigger obstacle area in order to avoid the physical obstacle
What can happen with mow speed aircrafts (Multirotor) ? It can happen that a multirotor enter in a obstacle area (staying very near of its center), in this moment Ground Speed Vector and Field Repulsion Vector have the same direction but reverse sign. This phenomenon causes a conflict and until the directions are sufficiently different to allow the multirotor moving, it will stay in an indecision situation. To solve this problem you can configure the obstacle area letting the obstacle center away from the route line.
There are some options available for each obstacle. To access them right-click on the center waypoint of the obstacle.
Set 3D: this option enables the aircraft to avoid an obstacle passing over it, taking account the height of the obstacle. The height can be edited as any waypoint, to access into the configuration menu double-click on it.
Set 2D: this option only takes account 2 dimensions for the obstacle. So, the platform won’t be able to avoid the obstacle passing over it
Remove: deletes the selected obstacle.