Navigation¶
This action is used to change the navigation mode used by the aircraft. By default, the UAV uses a sensor fusion Internal algorithm, but for example, if the GPS falls, this algorithm produces bad results so it would be convenient to change to another type if that happens (External). The navigation without GPS will make the aircraft fly stable but it will not be possible to command a path to follow during that time, so it can be used as a safety mode to avoid a malfunction of the system when the GPS signal is lost.
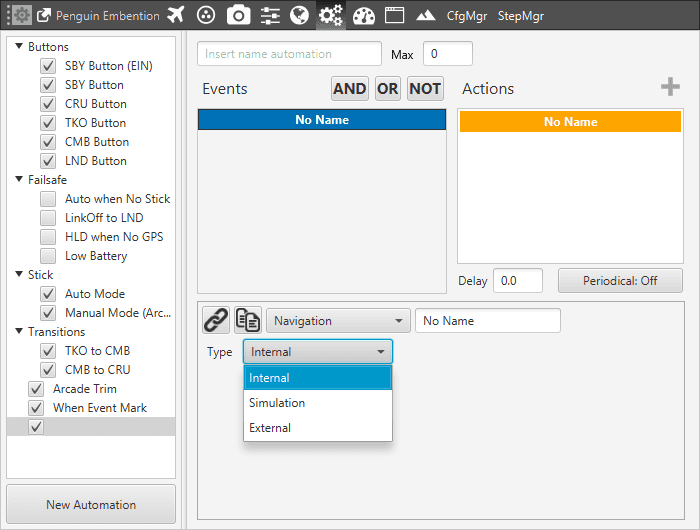
Action – Navigation
The options available are:
Internal: uses internal data for navigation. Data (position, attitude, etc.) is processed into Veronte Unit from sensor measures.
External: uses external data for navigation. Data (position, attitude, etc.) is provided by an external device.