Loop¶
In each one of the mission phases, it is possible to configure a controller for each control channel defined on Veronte Configuration. There are three different options for the control status.
Value |
Description |
|---|---|
Off |
Disables the controller. |
On |
Enables the Closed Loop Control. |
Fixed |
Sets the Open Loop Control parameters to a fixed value. |
PID Settings¶
When creating the controller for a channel, it is possible to select up to four different loops connected in series.
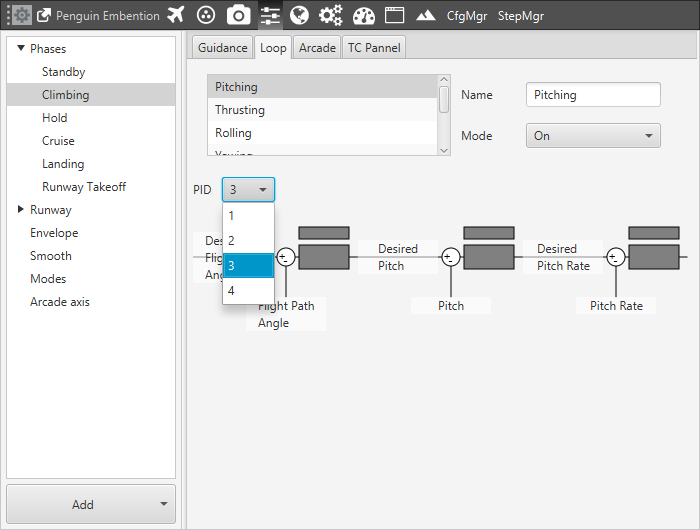
Loops Diagram
For each block, it is possible to configure the controller type and its parameters by selecting it on the pull-down menu shown in the following figure.
Loop Configuration
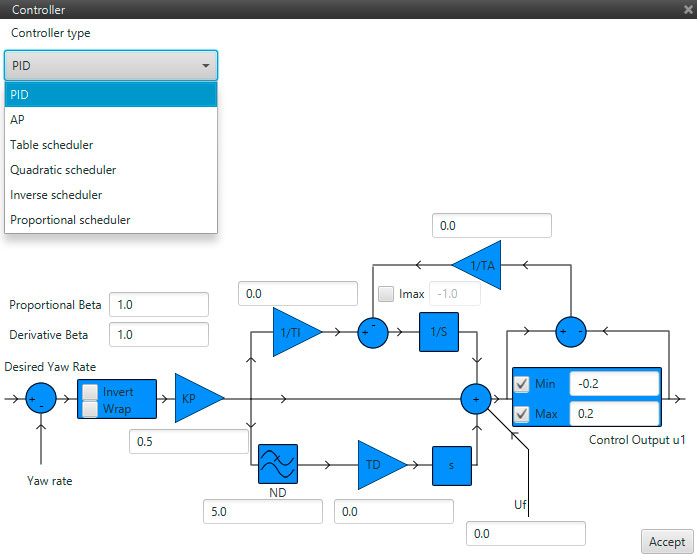
There are six different options that can be implemented for a controller on Veronte Pipe:
PID |
Classical PID controller. |
AP |
Adaptative-Predictive control. |
Gain scheduling controller |
Gain scheduling controller with variation of the parameters:Table Scheduler, Inverse Scheduler, Proportional Scheduler, Quadratic Scheduler |
In addition to the controller type, there are another set of parameters that can be changed in the window of each block.
Enable Sys ID: activates the option of system identification. The plant is modified continuously by predicting a new one according to a set of parameters. This option must be activated when working in Adaptative-.Predictive control.
Respect: this option is used for transition between phases. When activated the output of the controller is respected (is kept) when going from one phase to another. Normally, this is used in the internal control loops (rates) only to avoid great steps in the control parameters during transitions. If Respect is active in the external loops, the control will maintain attitude angles and heading/fly path angles during phase changing (for example), and this kind of control could be too much aggressive for the platform (depending on phases configuration). The Respect option can be activated in PID controllers only.
Noise Level & Filtering constant: parameters used for the AP controller.
Initial A & B: these buttons are used to establish the initial plants for the system identification process.
Exporting PIDs To Other Phases¶
Once it is considered that the PID is tuned, the user can easily export that PID in order to use it in other phases. To do so, just select Copy by right-clicking on the desired PID and click on the Block cell of the desired phase. That would copy only the gains of the PID (P, D and I), if the user also wants to copy the Limits, that column has to be checked.
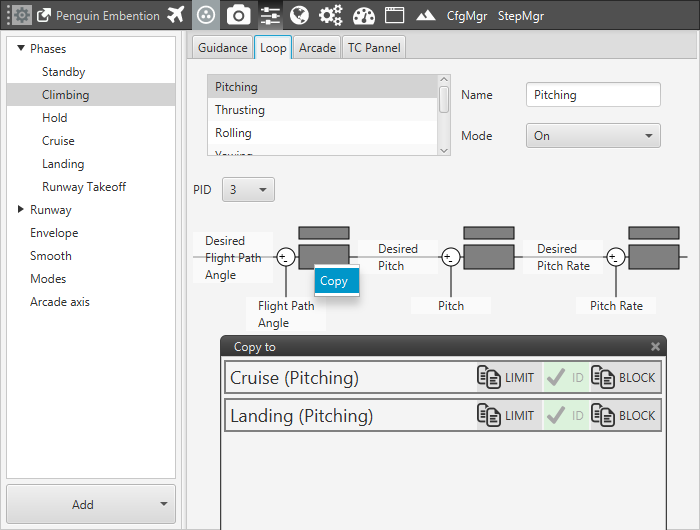
PID Exporting