Mission Phases¶
In this section, it will be explained the T-Rex typical mission profile and the mission phases will be detailed.
Stanby¶
Standby phase is a preliminary phase of the operation. During this phase is possible to check, for example, if the aircraft is correctly controlling the attitude by moving it and watching the servos positions changing.
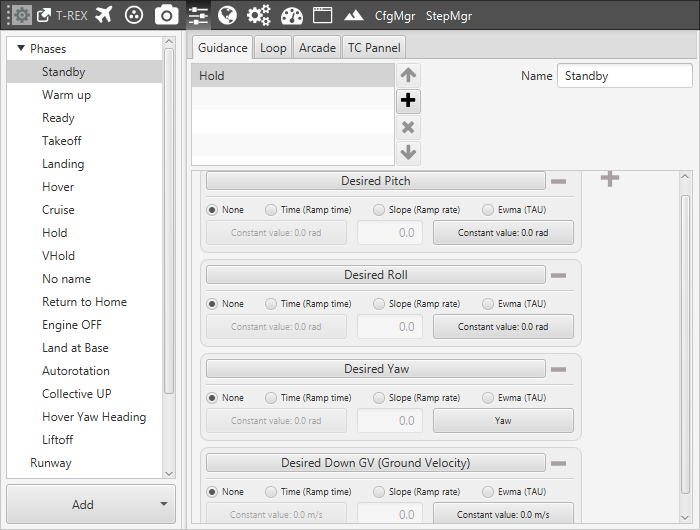
Standby phase panel
The guidance is a Hold of four variables:
Pitch and Roll angles: at 0 [rad].
Ground Speed: at 0 [m/s].
Yaw angle: set at the current.
Engine Off¶
Engine OFF is the phase which allows the platform decreasing main rotor RPMs without attitude changes. In fact, the decreasing phase is not instantaneous and the autopilot needs to keep the control until the RPMs would not be able to make attitude changes. Following this fact, this phase has a thrusting control set at zero and VTol and Yaw Guidances.
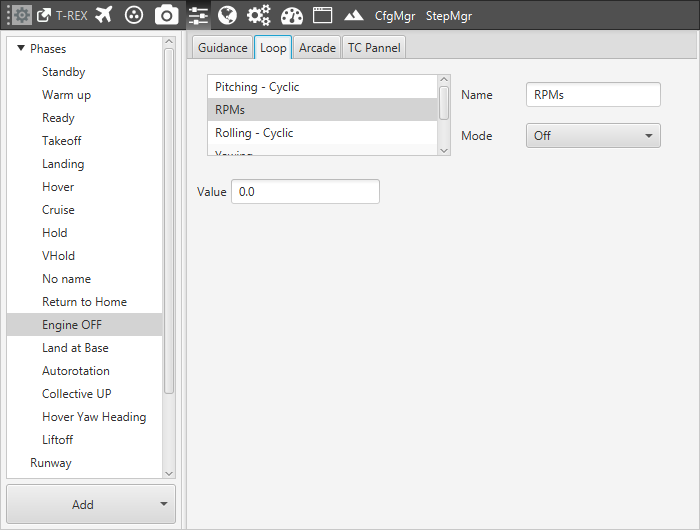
Thrusting fixed control
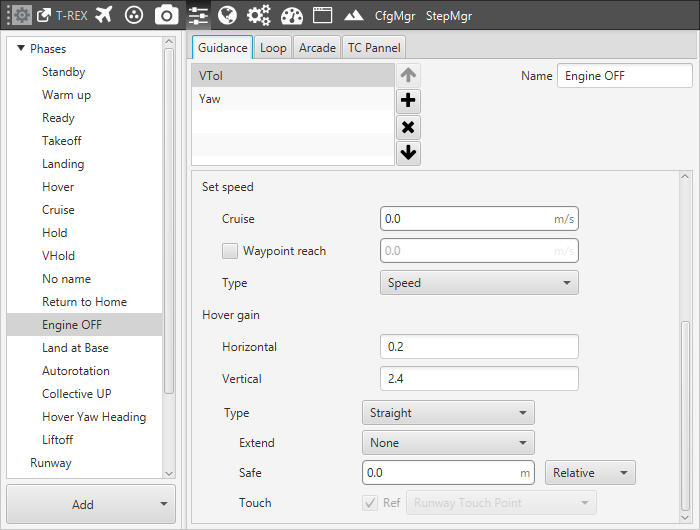
VTol Guidance settings
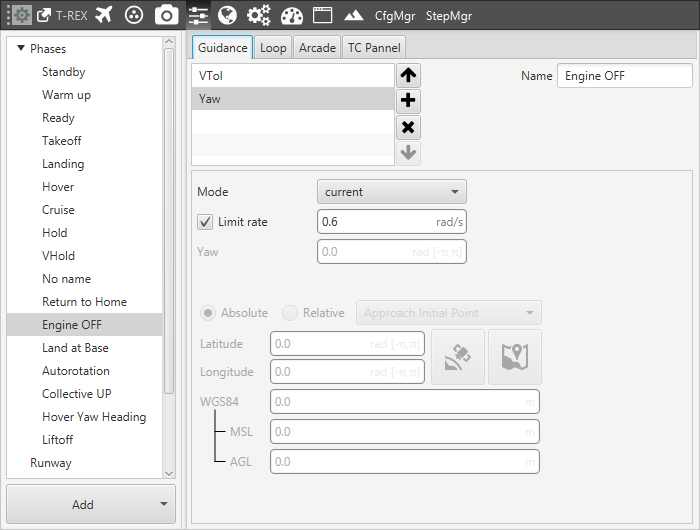
Yaw Guidance settings
Ignite¶
The Guidance of this phase is a Hold, which allows to mantain:
Desired Roll and Pitch angles: at 0 [rad].
During this phase RPM of the engine will increase until 35 % of thrust.
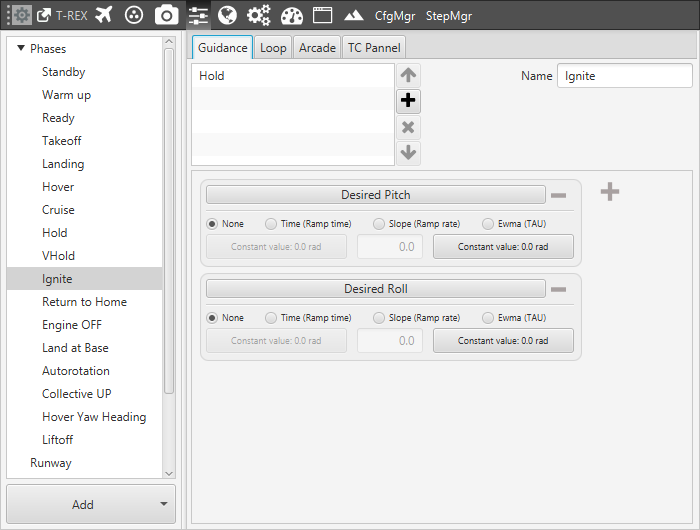
Hold Guidance configuration
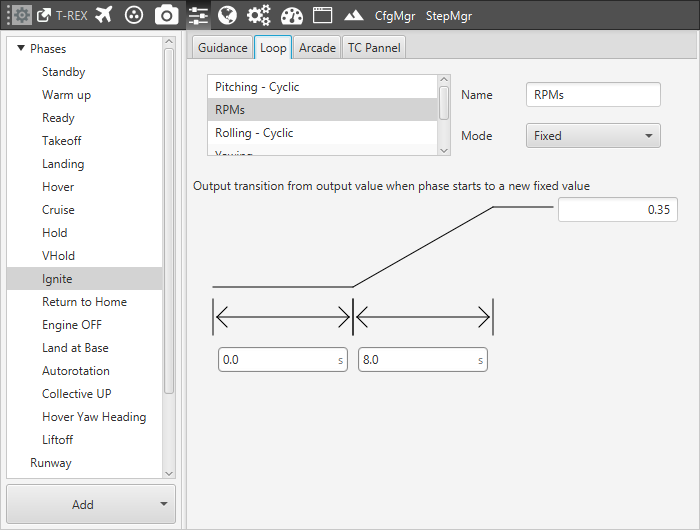
Engine RPM increasing settings
Ready¶
This phase is the one that starts to control RPM value with PID controller to maintain it at the desired value (Desired RPM). The Guidance are a Hold of RPMs (this guidance will be present in all flight phases), and the same VTol and Yaw of the Standby phase.
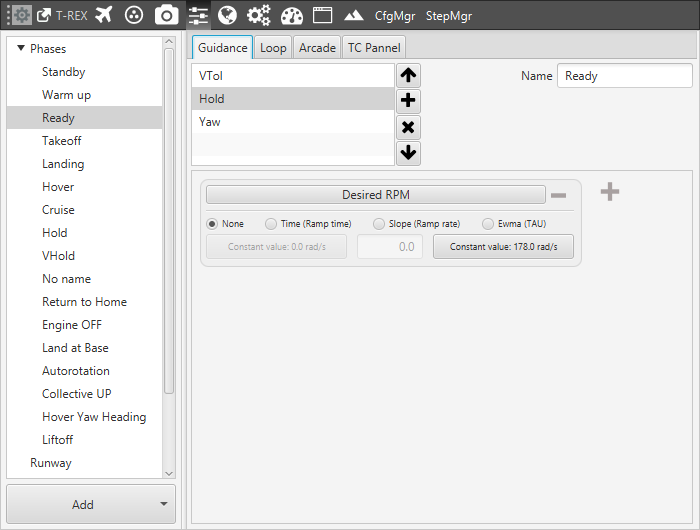
Desired RPM value
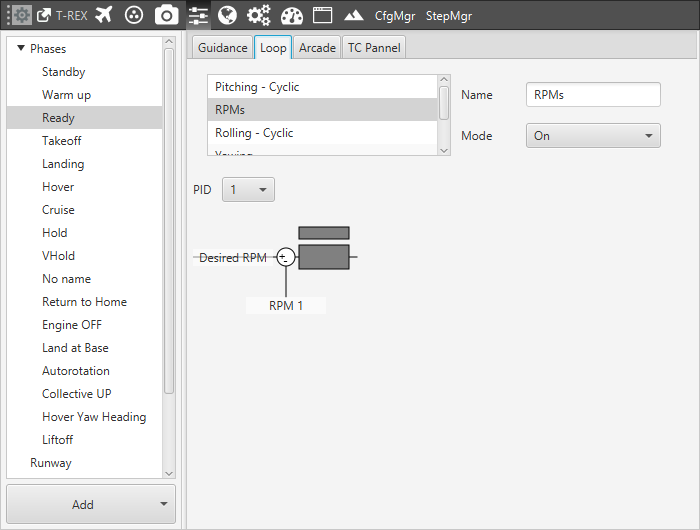
RPM control loop
Takeoff¶
Take-off phase is composed by 3 Guidances: VTol, Hold (RPM) and Yaw (Current). The first one is a vertical guidance and following parameters are set:
Line attraction: 5.0 [m].
Set Speed – Cruise: 1.5 [m/s].
Horizontal Hover Gain: 0.3.
Vertical Hover Gain: 2.24.
Safe Distance: -30 [m] and Relative (Positive down).
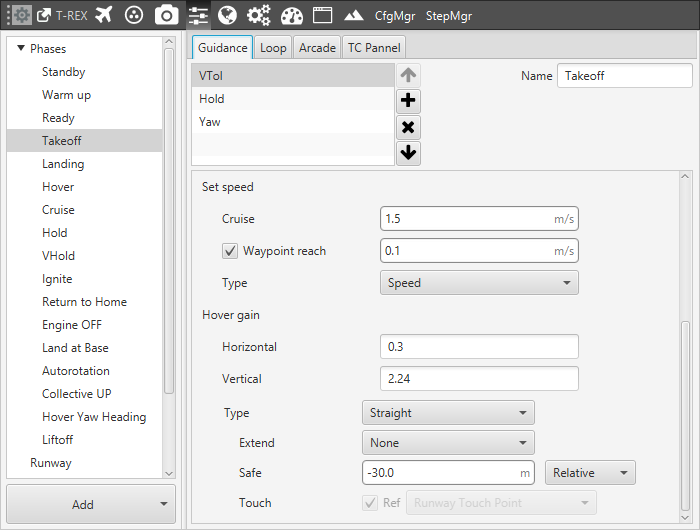
VTol panel
Hover¶
Hover phase is configured to allow the helicopter maintain the position in the air. The only difference between this phase and the Take Off phase is the Safe distance value which is set at 0 [m] in this case.
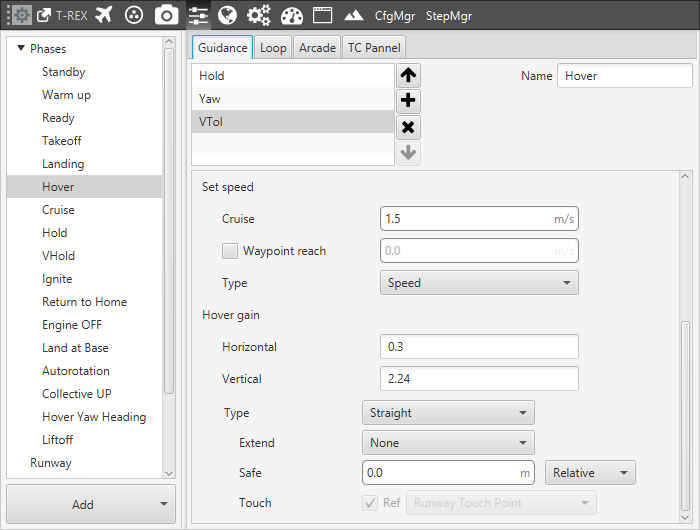
Hover phase panel
Cruise¶
In this phase, the Guidance is Cruise. The parameters to set are the Cruise Speeds (Cruise and Waypoint reach) and Acceleration limits.
Acceleration limit: 0.1.
Deceleration limit: 0.1.
Set Speed – Cruise: 2.0 [m/s].
Waypoint reach: 0.5 [m/s].
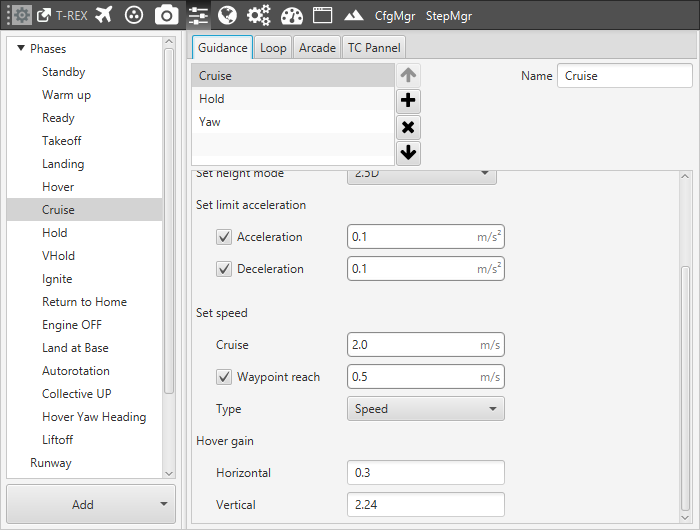
Cruise panel
Yaw Guidance is set in order to make the helicopter controlling yaw angle following the heading angle.
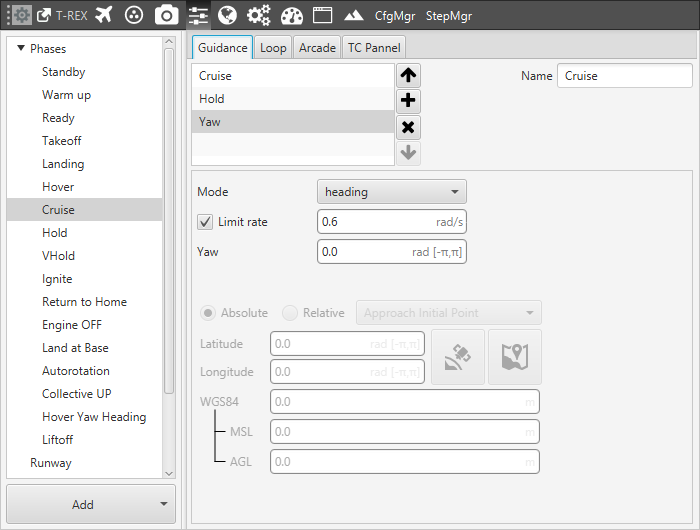
Yaw Guidance panel
Landing¶
This phase has the same settings of the Take-off with a positive value of Safe distance (positive down).
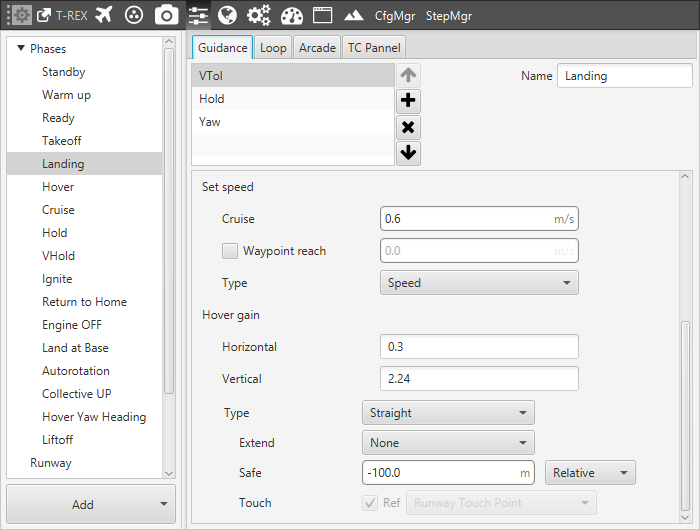
Landing phase panel
In this phase are set the same parameters of the Take Off phase. The only 2 changes are:
Set Speed – Cruise: 0.6 [m/s].
Safe Distance: -100.0 [m] and Relative (Positive down). In this case, we are supposing that at the instant when the Landing phase starts, the helicopter is flying at AGL < 100 [m].
Yaw Guidance is configured in order to let the helicopter with the Current yaw angle and limiting the yaw rate at 0.6 [rad/s].
Hold¶
Hold phase is used to perform a Stick controlled flight. The phase guidance is composed of Hold and Yaw guidances. It is a Hold which allows maintaining:
Desired pitch: at 0.0 [rad].
Desired roll: at 0.0 [rad].
Desired Down Ground Velocity: at 0.0 [m/s].
Desired RPMs: at 178.0 [rad/s].
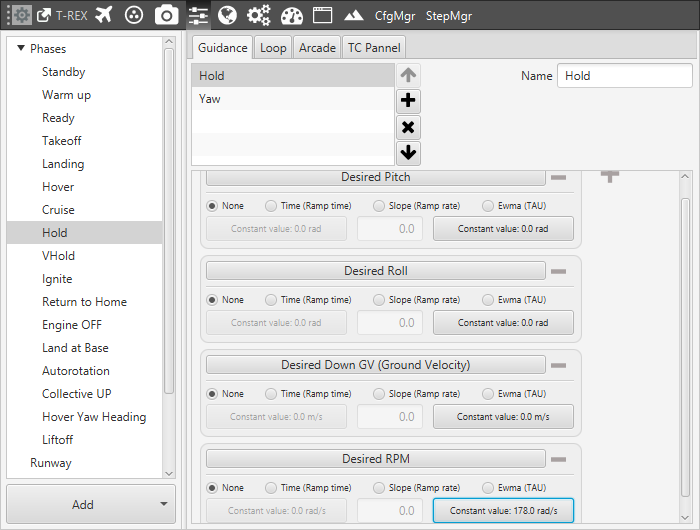
Hold phase panel
In this way, if the stick control is not active, the helicopter will keep its position in the air without the need of phase changing. The Yaw Guidance is set on Current. In this phase, the Arcade allows controlling the platform depending on the set gains.
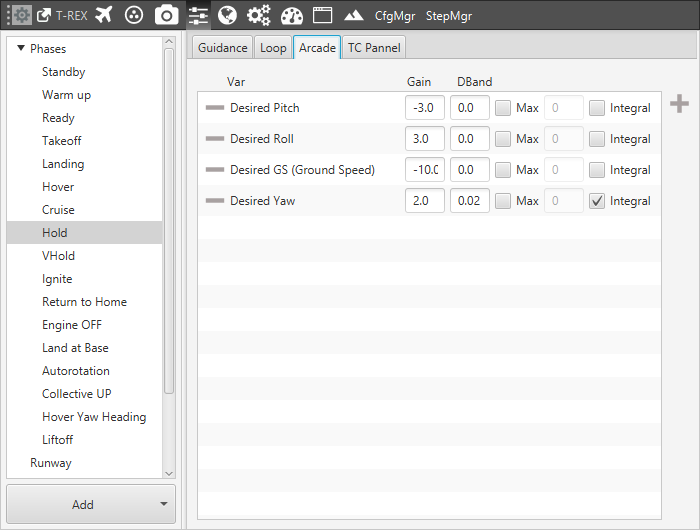
Arcade panel