Magnetometer¶
The magnetometer inputs expect to receive magnetic field measurements in 3 axes, as well as the sensor device temperature.
The S-function has 4 ports for magnetometer reading. In addition, as with IMUs, the user must take into account how the magnetometer is mounted (rotation matrix).
Hardware version |
Magnetometer |
Rotation Matrix |
|
|---|---|---|---|
4.0 |
MAG0 |
Internal LIS3MDL |
\(R =\begin{pmatrix} -1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & -1 \end{pmatrix}\) |
4.5 |
MAG0 |
Internal LIS3MDL |
\(R =\begin{pmatrix} -1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & -1 \end{pmatrix}\) |
MAG1 |
Internal MMC5883MA |
\(R =\begin{pmatrix} 0 & -1 & 0 \\ -1 & 0 & 0 \\ 0 & 0 & 1 \end{pmatrix}\) |
|
4.8 |
MAG0 |
Internal LIS3MDL |
\(R =\begin{pmatrix} 0 & 0 & -1 \\ 0 & 1 & 0 \\ 1 & 0 & 0 \end{pmatrix}\) |
MAG1 |
Internal MMC5883MA |
\(R =\begin{pmatrix} 0 & 0 & 1 \\ -1 & 0 & 0 \\ 0 & 1 & 0 \end{pmatrix}\) |
|
MAG2 |
Internal RM3100 |
\(R =\begin{pmatrix} 0 & 0 & 1 \\ 1 & 0 & 0 \\ 0 & 1 & 0 \end{pmatrix}\) |
|
Important
Please note that the number of inputs (ports) corresponds to the maximum number of inputs available on all hardware and SIL Simulator versions, as can be seen in the aforementioned table.
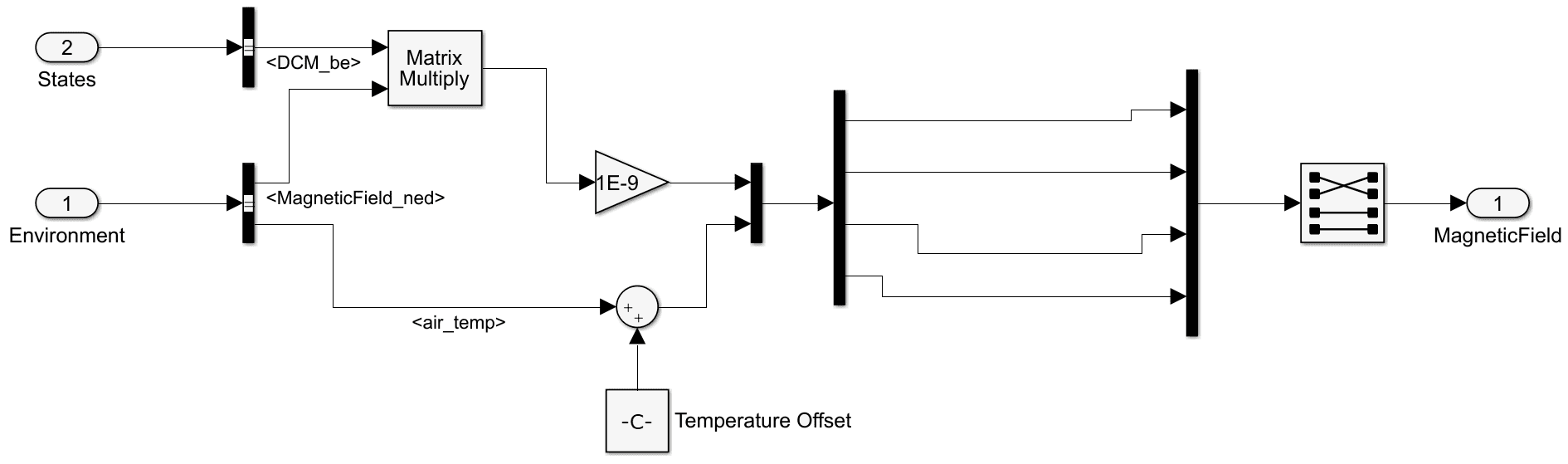
Magnetometer - Subsystem¶
The user can also simulate another magnetometer (external magnetometer) and send the information through a serial port. For more information on serial communication, refer to Serial communications section of this manual.