SIL Simulink¶
The Veronte Autopilot 1x is implemented in Simulink blocks with an S-Function.
This kind of block takes a C, C++, Fortran or even Matlab code, and implements it in a block containing a certain number of inputs and outputs. A typical 1x Autopilot S-Function is shown below.
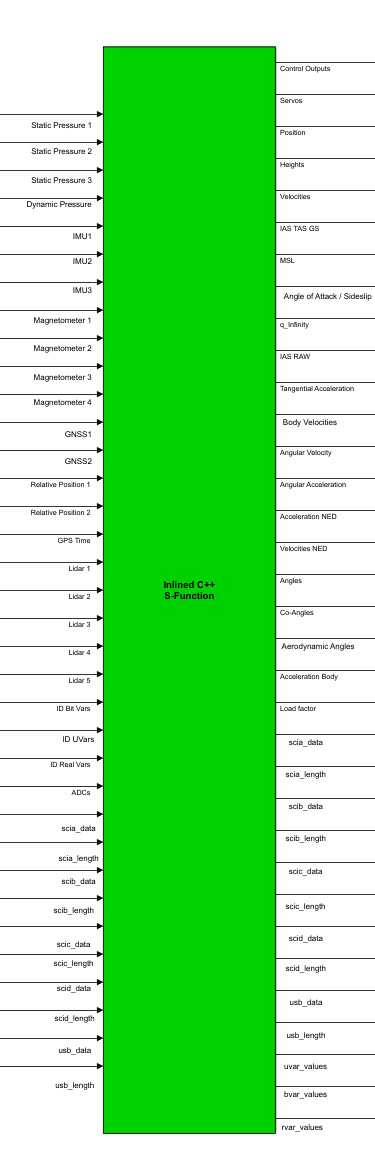
S-Function containing the autopilot embedded code¶
Inputs¶
Inputs are described in the next table:
PIN |
Signal Type |
Description |
Form |
Size |
Units |
|---|---|---|---|---|---|
1 |
Input |
Static Pressure 1 |
[pressure_measurement;sensor temperature] |
2x1 |
\(Pa\) ; \(K\) |
2 |
Input |
Static Pressure 2 |
[pressure_measurement;sensor temperature] |
2x1 |
\(Pa\) ; \(K\) |
3 |
Input |
Static Pressure 3 |
[pressure_measurement;sensor temperature] |
2x1 |
\(Pa\) ; \(K\) |
4 |
Input |
Dynamic Pressure |
[pressure_measurement;sensor temperature] |
2x1 |
\(Pa\) ; \(K\) |
5 |
Input |
IMU 1 |
[acc_x;acc_y;acc_z;gyr_x;gyr_y;gyr_z;sensor temperature] |
7x1 |
\(\frac{m}{s^2}\) ; \(\frac{rad}{s}\) ; \(K\) |
6 |
Input |
IMU 2 |
[acc_x;acc_y;acc_z;gyr_x;gyr_y;gyr_z;sensor temperature] |
7x1 |
\(\frac{m}{s^2}\) ; \(\frac{rad}{s}\) ; \(K\) |
7 |
Input |
IMU 3 |
[acc_x;acc_y;acc_z;gyr_x;gyr_y;gyr_z;sensor temperature] |
7x1 |
\(\frac{m}{s^2}\) ; \(\frac{rad}{s}\) ; \(K\) |
8 |
Input |
Magnetometer 1 |
[mag_x;mag_y;mag_z;sensor temperature] |
4x1 |
\(T\) ; \(K\) |
9 |
Input |
Magnetometer 2 |
[mag_x;mag_y;mag_z;sensor temperature] |
4x1 |
\(T\) ; \(K\) |
10 |
Input |
Magnetometer 3 |
[mag_x;mag_y;mag_z;sensor temperature] |
4x1 |
\(T\) ; \(K\) |
11 |
Input |
Magnetometer 4 |
[mag_x;mag_y;mag_z;sensor temperature] |
4x1 |
\(T\) ; \(K\) |
12 |
Input |
GNSS 1 |
[1;3;lon;lat;alt;hr_accu;vt_accu;v_n;v_e;v_d;v_accu] |
11x1 |
\(deg \cdot 10^7\) ; \(mm\) ; \(\frac{mm}{s}\) |
13 |
Input |
GNSS 2 |
[1;3;lon;lat;alt;hr_accu;vt_accu;v_n;v_e;v_d;v_accu] |
11x1 |
\(deg \cdot 10^7\) ; \(mm\) ; \(\frac{mm}{s}\) |
14 |
Input |
Relative Position 1 |
[1;x_rel;y_rel;z_rel;d_x;d_y;d_z;x_accu;y_accu;z_accu] |
10x1 |
\(cm\) ; \(mm \cdot 10^{-1}\) |
15 |
Input |
Relative Position 2 |
[1;x_rel;y_rel;z_rel;d_x;d_y;d_z;x_accu;y_accu;z_accu] |
10x1 |
\(cm\) ; \(mm \cdot 10^{-1}\) |
16 |
Input |
GPS Time |
[week_number;milliseconds_of_week] |
2x1 |
-; \(ms\) |
17 |
Input |
Lidar 1 |
[lidar_measurement] |
1x1 |
\(cm\) |
18 |
Input |
Lidar 2 |
[lidar_measurement] |
1x1 |
\(cm\) |
19 |
Input |
Lidar 3 |
[lidar_measurement] |
1x1 |
\(cm\) |
20 |
Input |
Lidar 4 |
[lidar_measurement] |
1x1 |
\(cm\) |
21 |
Input |
Lidar 5 |
[lidar_measurement] |
1x1 |
\(cm\) |
22 |
Input |
ID Bit Var |
[Var_IDs] |
50x1 |
- |
23 |
Input |
ID Unsigned Var |
[Var_IDs] |
50x1 |
- |
24 |
Input |
ID Real Var |
[Var_IDs] |
50x1 |
- |
25 |
Input |
ADCs |
[adc(1-17)] |
17x1 |
- |
26 |
Input |
SCIA Data |
[serial_data] |
1024x1 |
- |
27 |
Input |
SCIA Length |
[serial_length] |
1x1 |
- |
28 |
Input |
SCIB Data |
[serial_data] |
1024x1 |
- |
29 |
Input |
SCIB Length |
[serial_length] |
1x1 |
- |
30 |
Input |
SCIC Data |
[serial_data] |
1024x1 |
- |
31 |
Input |
SCIC Length |
[serial_length] |
1x1 |
- |
32 |
Input |
SCID Data |
[serial_data] |
1024x1 |
- |
33 |
Input |
SCID Length |
[serial_length] |
1x1 |
- |
34 |
Input |
USB Data |
[serial_data] |
1024x1 |
- |
35 |
Input |
USB Length |
[serial_length] |
1x1 |
- |
Outputs¶
Outputs are the following:
PIN |
Signal Type |
Description |
Form |
Size |
Units |
|---|---|---|---|---|---|
1 |
Output |
Control Outputs |
[control_outputs(1-20)] |
20x1 |
- |
2 |
Output |
Servo Values |
[servos(1-32)] |
32x1 |
- |
3 |
Output |
Position |
[lon;lat;alt] |
3x1 |
\(rad\) ; \(m\) |
4 |
Output |
Heights |
[msl,agl] |
2x1 |
\(m\) |
5 |
Output |
Velocities |
[longitudinal_v;lateral_v;velocity(module)] |
3x1 |
\(\frac{m}{s}\) |
6 |
Output |
IAS TAS GS |
[ias,tas,gs] |
3x1 |
\(\frac{m}{s}\) |
7 |
Output |
MSL |
[msl_from_qnh;msl_from_ISA] |
2x1 |
\(m\) |
8 |
Output |
Angle of Attack / Sideslip |
[angle_of_attack;sideslip] |
2x1 |
\(rad\) |
9 |
Output |
Q_Infinty |
[dynamic_pressure] |
1x1 |
\(Pa\) |
10 |
Output |
IAS RAW |
[ias_raw] |
1x1 |
\(\frac{m}{s}\) |
11 |
Output |
Tangential Acceleration |
[tangential_acceleration] |
1x1 |
\(\frac{m}{s^2}\) |
12 |
Input |
Body Velocities |
[longitudinal_v;lateral_v;vertical_v] |
3x1 |
\(\frac{m}{s}\) |
13 |
Output |
Angular Velocities |
[roll_rate;pitch_rate;yaw_rate] |
3x1 |
\(\frac{rad}{s}\) |
14 |
Output |
Angular Acceleration |
[acc_z_axis;acc_y_axis;acc_x_axis] |
3x1 |
\(\frac{rad}{s}\) |
15 |
Output |
Acceleration NED |
[acc_north;acc_east;acc_down] |
3x1 |
\(\frac{m}{s^2}\) |
16 |
Output |
Velocity NED |
[v_north;v_east;v_down] |
3x1 |
\(\frac{m}{s}\) |
17 |
Output |
Angles |
[Yaw;Pitch;Roll] |
3x1 |
\(rad\) |
18 |
Output |
Co-Angles |
[co-Yaw;co-Pitch;co-Roll] |
3x1 |
\(rad\) |
19 |
Output |
Aerodynamic Angles |
[heading,flight_path;bank_angle] |
3x1 |
\(rad\) |
20 |
Output |
Acceleration Body |
[acc_x,acc_y;acc_z] |
3x1 |
\(\frac{m}{s^2}\) |
21 |
Output |
Load factor |
[nx;ny;nz] |
3x1 |
- |
22 |
Output |
SCIA Data |
[serial_data] |
1024x1 |
- |
23 |
Output |
SCIA Length |
[serial_length] |
1x1 |
- |
24 |
Output |
SCIB Data |
[serial_data] |
1024x1 |
- |
25 |
Output |
SCIB Length |
[serial_length] |
1x1 |
- |
26 |
Output |
SCIC Data |
[serial_data] |
1024x1 |
- |
27 |
Output |
SCIC Length |
[serial_length] |
1x1 |
- |
28 |
Output |
SCID Data |
[serial_data] |
1024x1 |
- |
29 |
Output |
SCID Length |
[serial_length] |
1x1 |
- |
30 |
Output |
USB Data |
[serial_data] |
1024x1 |
- |
31 |
Output |
USB Length |
[serial_length] ) |
1x1 |
- |
32 |
Output |
Unsigned Variables |
[selected variables(1-50)] |
50x1 |
- |
33 |
Output |
Bit Variables |
[selected variables(1-50)] |
50x1 |
- |
34 |
Output |
Real Variables |
[selected variables(1-50)] |
50x1 |
- |
In the following sections, the user can have a look at how to implement the sensors and telemetry blocks, as well as general visualisation of a complete simulation.