Quick Start¶
SIL Simulator user manual includes a basic description of how Veronte Autopilot 1x works with Veronte Console and with Simulink blocks.
SIL zip files¶
SIL zip files¶
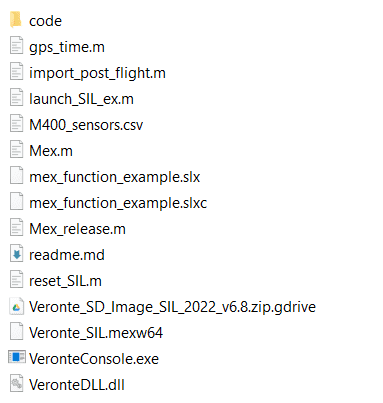
The basic SIL package consists of the followings files:
code folder: Folder containing the code to access (compile) the Veronte DLL.
gps_time.m: A matlab function that calculates the GPS/GNSS number of weeks.
import_post_flight.m: A matlab script to load an external source of inertial data (IMU). It reads this information from a csv file.
launch_SIL_ex.m: Launches the
import_post_flight.mandmex_function_example.slxfiles.M400_sensors.csv: Example of csv file to import with import_post_flight.m.
Mex.m: Consists of all compiled embedded Veronte Autopilot 1x code.
Compiles the code in
.cppcontained in the code folder, and thereby creates the simulink block.mex_function_example.slx: Example of the simulink block, the S-Function. This is what the customer has to modify to create his own model.
mex_function_example.slxc: File that simulink auto-generates from the
.slxfile.readme.md: Readme file to know how to work with SIL Simulator.
reset_SIL: Script to clear mex related code in matlab to ensure a good reboot. If everything works as expected, it is executed at the end of every simulation, but it might be neccesary to execute it by hand if something goes wrong.
Veronte_SD_Image_SIL_2022_v6.8.zip.gdrive: Link to Google Drive to download the SIL Image.
In case of having any problem with permission, please contact the support team (create a ticket in the customer’s Joint Collaboration Framework; for more information, see Tickets section of the JCF manual).
VeronteConsole.exe: Veronte Console executable file.
VeronteDLL.dll: File to be executed by Veronte Console or SIL Simulink.
If this file is located in a folder other than this one, the user must create a file called “dll_config.vcfg” to specify the path. For more information on this, see Connection section of this manual.
Requirements¶
SIL image: Veronte Autopilot 1x SD image downloadable from Guest FTP.
VeronteDLL: Dynamic Link Library containing the Veronte AP code.
Veronte Software Package:
Veronte Link (v6.8.X): Used to connect 1x Autopilot to the other tools.
1x PDI Builder (v6.8.X): To build and load PDIs.
Veronte Ops (v6.8): Operations interface.
SIL Simulink
To perform a SIL simulation using simulink with the Veronte Autopilot 1x, the following programs and toolboxes are required in addition to the requirements described above:
MATLAB + Simulink (basic package).
The user can be helped by other simulink toolboxes when implementing their model:
Simulink Real-Time: This blockset contains useful blocks to be used with buses: UDP/RS232/CAN.
Aerospace toolbox: Contains sensor blocks, flight instruments and environment blocks.
Microsoft Visual Studio 2015 (or later) as your MEX compiler. Despite .mex file is already compiled and it works as a black box, some libraries are necessary.
First, get Microsoft Visual Studio from here.
Follow the onscreen steps, please make sure that C++ tools are selected (they may appear as an optional item).
When finished, select it as your default MEX compiler by typing in MATLAB console mex -setup c++.