Servo Configuration¶
Once the Autopilot has been installed and connected according to the guidelines that appear in the section Hardware Installation , the first step of the configuration process is the adjustment and trimming of the servos. The next list contains the instructions to follow in order to trim the platform servos.
Set which servo number will have each one of the controls. Mentor has a conventional aircraft configuration, so there are five controls: elevator, two ailerons, rudder and throttle. Each one of these controls is assigned to a value of the “Actuator Output” vector (s) according to the pin where it is connected. It is possible to assign any value to any control, i.e the control connected to Pin1 can be s1, s2, s3, s4 or s5.
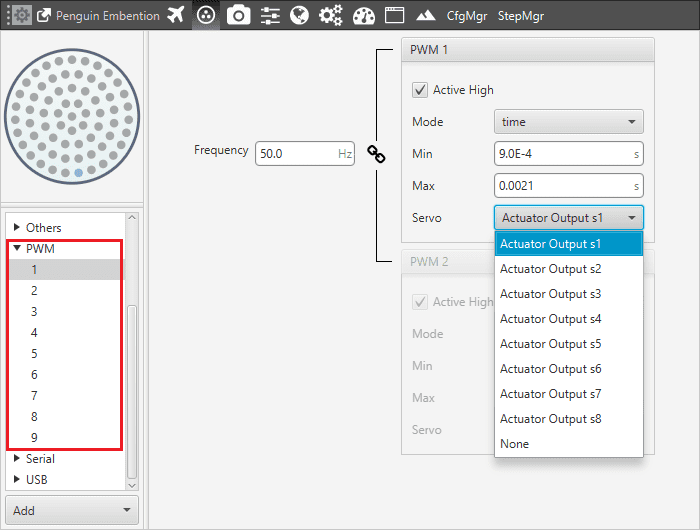
Actuator Output
Right Aileron: Actuator Output s1
Elevator: Actuator Output s2
Throttle: Actuator Output s3
Rudder: Actuator Output s4
Left Aileron: Actuator Output s5
Note: Name Actuator Output s can be changed to other more identifiable according to the real actuator such as right or left aileron, see section System Variables.
With the five controls now having a value of the S vector, the SU matrix can now be edited. Here the user configures the relation between the controller outputs (“u”) and the servo movements (“s”). In the case of Mentor, each control channel is related with only one servo: the pitching with the elevator, the rolling with the ailerons, the yawing with the rudder and the thrusting with the throttle, so the SU matrix will be as follows, taking into account which s corresponds which control according to the connections.
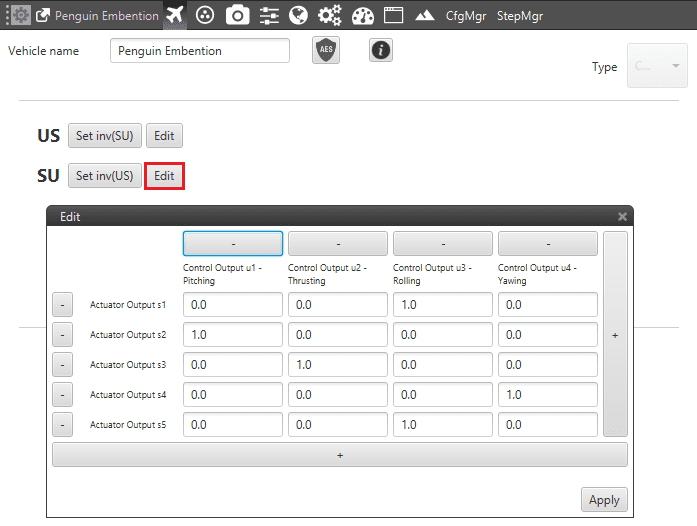
SU Matrix Configuration
Pitching (u1): Actuator Output s2 (Elevator)
Thrusting (u2): Actuator Output s3 (Throttle)
Rolling (u3): Actuator Output s1 and s5 (Ailerons)
Yawing (u4): Actuator Output s4 (Rudder)
Finally, the servo position has to be linked with a real variable, for example, the angle of the control surface or the throttle level. Besides, here are set the physical limits of the servo in the case when it is not possible for it to move in the full range (0-100%).
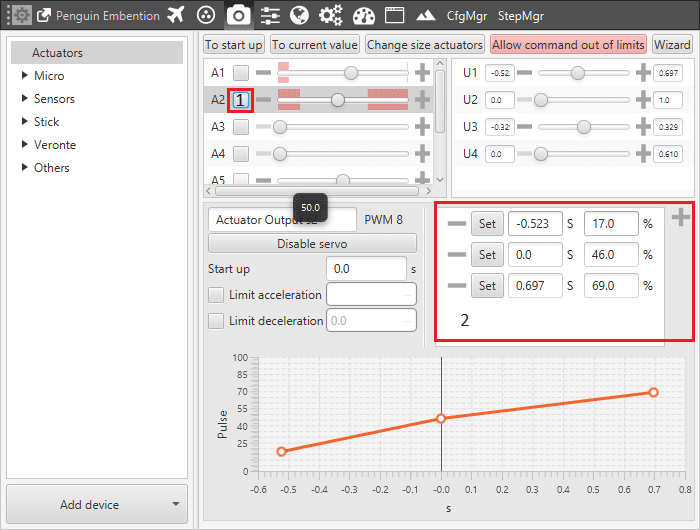
Servos Configuration
Servos can be moved from the actuators menu when being in INI phase (no phase in green in Veronte Panel).
When 1 is marked, the slide bar allows the movement of that servo.
The curve points are added in 2.
Let’s consider the elevator (s2,A2) as an example. In Mentor, the elevator can not be moved totally down because it hits the landing gear, and neither totally up because it hits the rudder. Taking note of the pulse value at this points, the limits of the servo are obtained: 17% and 69% in the example of the previous figure. Measuring also the surface deflection at those points (-0.523 and 0.697 radians) the servo curve is totally defined (including also the point where the deflection is zero).