Automations¶
Automations are the mechanisms used to perform an action when some event is triggered. These actions could be a change from one phase to another, taking a photo, dropping a payload and so on. In this section, the conventional automations used in a flight of the Mentor airplane will be detailed.
The first automations to be created are the ones linked to the buttons of Veronte Panel. When clicking one of these buttons the phase is changed to the one shown on the button label.
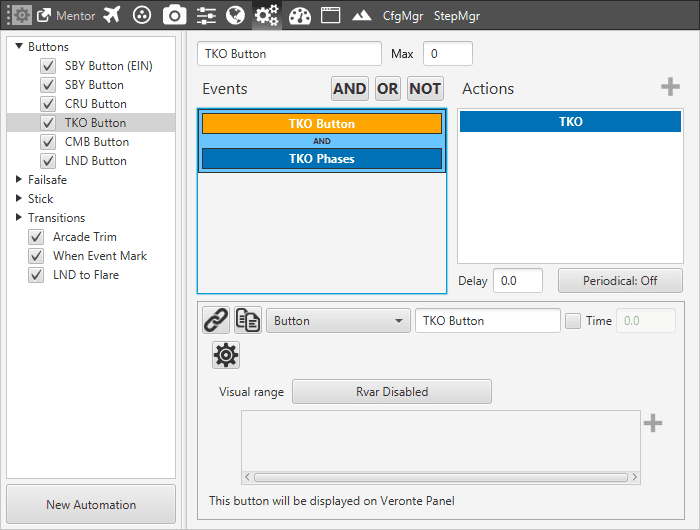
Automation Panel
Normally, besides the button event, a safety condition is added to the automation, which consists on letting only the system to change to a phase when being in a certain set of phases. For example, only change to cruise when being in climbing or change to landing when being in cruise or climbing. It is only necessary to create an AND condition with the phases to change from. In the previous figure, the automation is the change to takeoff when clicking on Veronte panel, being on Standby. This process is repeated for the rest of phases.
Takeoff to Climb¶
The change from the take off to the climbing phase occurs when the IAS of Mentor on the runway is greater than 8 m/s. There are two events to be configured:
Variable: IAS > 8 [m/s].
Phases: Standby.

Take off to Climb – Automation
The action will be a change of Phase:
Phase: Climbing.
Climbing to Cruise¶
When a certain altitude is reached, Mentor changes to the Cruise phase where it starts to follow the path determined by the user. As a safety condition, the change will only happen when having a speed greater than 6 meters per second. There are three events to be configured:
Variable: AGL > 90 [m].
Variable: IAS > 6 [m/s].
Phases: Climbing.

to Cruise - Automation
Finally, the action will be a change of Phase:
Phase: Cruise.
Radio Error¶
When the radio connection from the ground station to Mentor is lost, the aircraft is forced to change to auto mode and land. It is necessary to configure two events:
Variable: TX or RX error (TX /RX Packet Error Rate (on board)), greater than 0.
Phases: Climbing or Cruise.
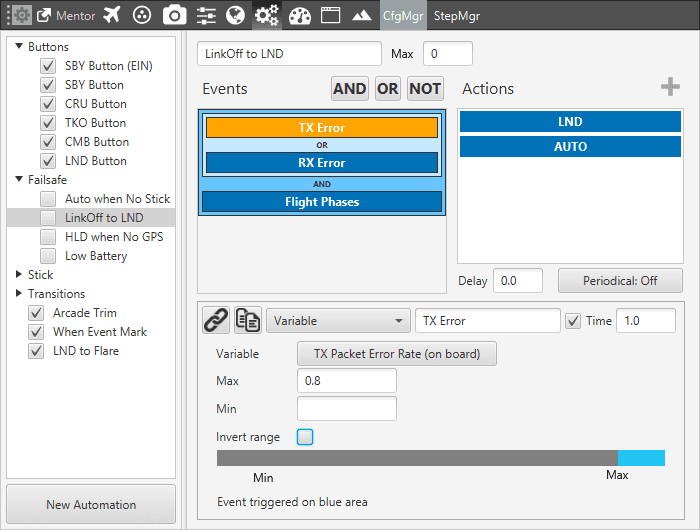
Radio Error – Automation
Two actions are configured:
Phase: Landing.
Mode: Auto.
When the value of the flag that evaluates the TX or RX error (“TX Packet Error Rate (on board”) has a value greater than 0.8, being the aircraft in climb or cruise phases, it is forced to land. The value 0.8 means that 80 percent of the packets send trough the radio link have been lost.
Low Battery¶
When the battery is below a certain level (15.2 Volts in this case), and the aircraft is in climb or cruise, it is automatically commanded to land. The events to configure are:
Variable: Power Input < 15.2 [V].
Phases: Climbing or Cruise.

Low Battery – Automation
Two actions are configured:
Phase: Landing.
Mode: Auto.
Landing to Flare¶
The change from the landing to flare phase is triggered when the aircraft is above the runway and about to touch the ground. This idea is implemented with a set of three events:
AGL: the aircraft is below a certain altitude, in this case, 8 meters.
Inside Polygon: Mentor enters in a polygon defined in the map on the runway head.
Landing Phase: the aircraft is landing phase.

Landing to Flare
When these events are fulfilled, Mentor enters in the Flare phase and lands.
Stick Auto¶
This automation changes the control mode according to the command sent by the radio controller. Only an event is necessary:
Variable: Stick Input rX, greater than 0.75.
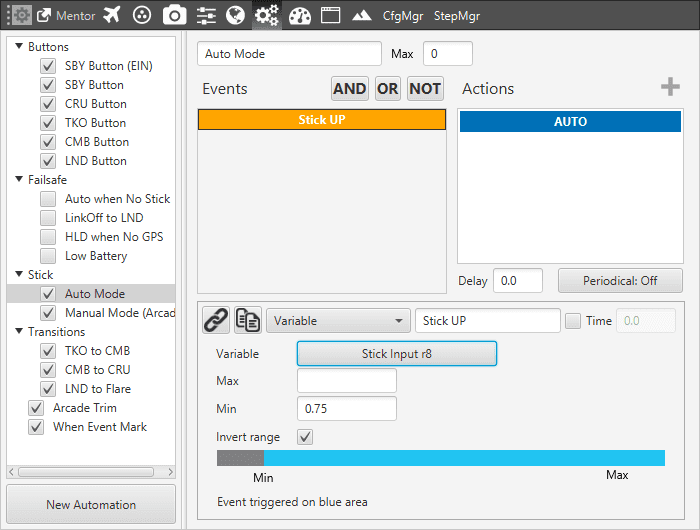
Stick Auto
The action is:
Mode: Auto
As it can be seen, the channel that controls the mode is the 8, so according to its value the mode is changed.
The process is the same when creating manual mode, but now the value of Stick Input r8 has to be lower than 0.25.