Obstacle Detection¶
Obstacle detection allows the creation of obstacles that the platform will consider for its Navigation. It could be an external source of obstacles or the sensors connected to Veronte with the selection of the sensors range.
External¶
If a user connects an Obstacle provider system to Veronte, it has to be enabled from this menu.
The Refresh time is the time it takes Veronte to check again the obstacle status from the external device. This is used to know when an obstacle has disappear from range or a new obstacle is inside it.
Obstacle Detection - External
Obsens¶
This panel contains the configuration menu to set the obstacles creation.
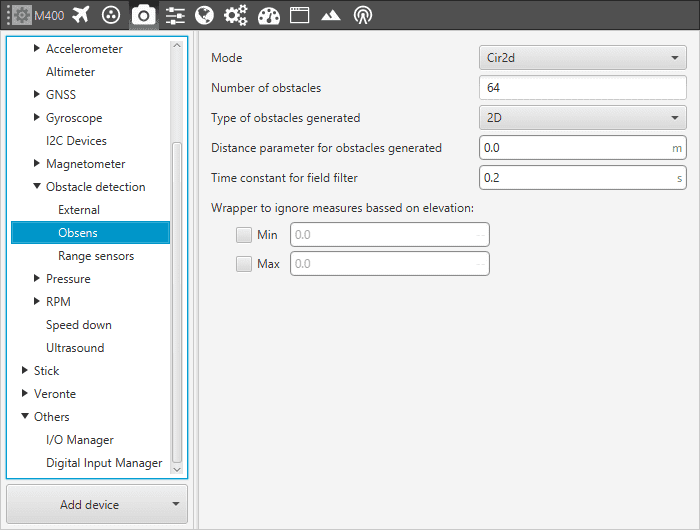
Obstacle Detection - Obsens
In this panel, it can be configured the following Obsens parameters:
Mode: Cir2d (circular – 2 dimensions), Raw and off mode can be selected.
Raw. The sensors create the obstacle where it is located. At next step, if the obstacle is not present, the area is cleared.
Cir2d. Allows to input the number of divisions the area around the platform will have (considering a circular area). If one area is blocked due to an obstacle presence, even the sensors lost that obstacle, the area will remain blocked until enough distance has been reached.
Off. The obstacle detection is not enabled.
Type of obstacles generated. 2D or 3D obstacles can be generated.
Distance parameter for obstacle generated. Defines de radius of the obstacles generated with Obsens.
Time constant for field filter. Filter applied to smooth the transition when obstacles are affecting the control.
Wrapper. A minimum and a maximum elevation wrapper can be activated in order to limit the obstacle generation in a limited cone angle.
When configuring this sensor, obstacles will be created automatically, working similarly to the ones created in the mission toolbar.
Range sensors¶
The following figure shows the menu to configure the sensors which are used during the obstacle detection.
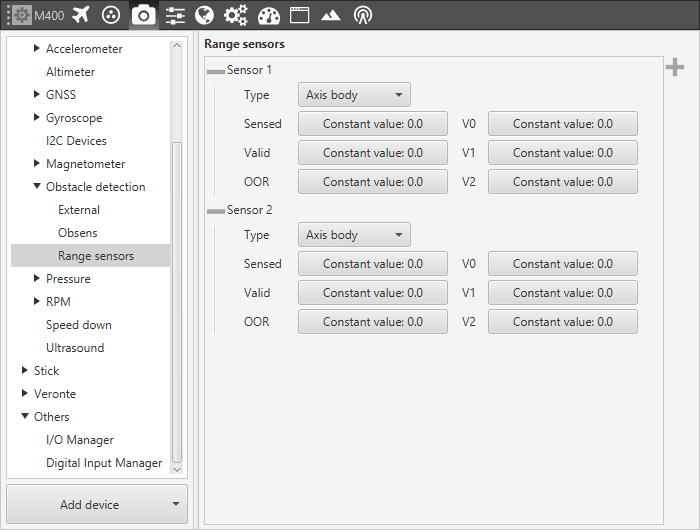
Obstacle Detection - Range Sensors
In this menu can be configured the following parameters:
Type. Allows the user to select the kind of orientation which will be used: Axis body, Angles body or Angles NED
V0, V1,V2. Once an orientation is selected, it is possible to edit where the sensor is pointing to by editing these values.
Sensed. To select the variable which is measured.
Valid. Usually sensors incorporates a varible to know if the data measured is valid. If that variable has been stored, it is possible to select it.
OOR. Allows the user to select the variable that indicates if the data measured is out of range.