Altimeter¶
The following figure shows the configuration menu for an external altimeter like LIDAR, Sonar, etc.

Altimeter Menu - Configuration Parameters
Sensor Type. This drop-down list allows the user to choose between two possible configurations:
AGL. AGL stands for Height Above Ground Level. This options is intended for use with altimeters that do not depend on the inclination of the platform (e.g. barometric) or when this inclination is or will be negligible.
Distance. It is meant to be used with radar altimeter or Lidar systems. The distance to the ground (or to a certain object of interest) is corrected taking into account the inclination angles and, also, the X, Y and Z offset between the altimeter position and the origin of the body frame.
Min time diff to allow preload. Establishes the maximum frequency at which this sensor values will enter the Navigation filter. I.e. if it is executed at 50 Hz and we set (as in the picture 0.1 s) 10 Hz, there will be loops when the value is the one stored before.
Position of altimeter (Body frame). Parameter to indicate the distance from the altimeter to the centre of gravity of the platform. This is used to take into account the weight of the altimeter in the aircraft control.
Enable tilt limit: The altimeter is normally installed in a fixed position having a constant direction with respect to the platform. Taking a LIDAR as an example, it is used to measure altitude so it has to point towards the ground, in a direction parallel to the Z body axis. When the vehicle is not level on its X or Y axis (has a pitch or roll angle different from zero), the LIDAR will not point in a direction perpendicular to the ground, and the measurement taken will not be the real altitude of the aircraft. This option is a safe condition to discard the measure of an altimeter when its tilt angle exceeds a certain value.
Sensor variance. It is a measurement related to sensor error, whose units are squared meters. It indicates the weight that this measure will have in the sensor fusion algorithm that combines the information of different sensors to generate an altitude estimation.
Input Variable. Input variable to which the parameters defined here will be applied.
Enable sensor limits. It is the range in which the sensor measurement is taken to be processed by Veronte Pipe. Any outer value will be discarded by the system.
The following figure shows a diagram with the values of maximum and minimum sensor limits altitude, and the maximum tilt angle.
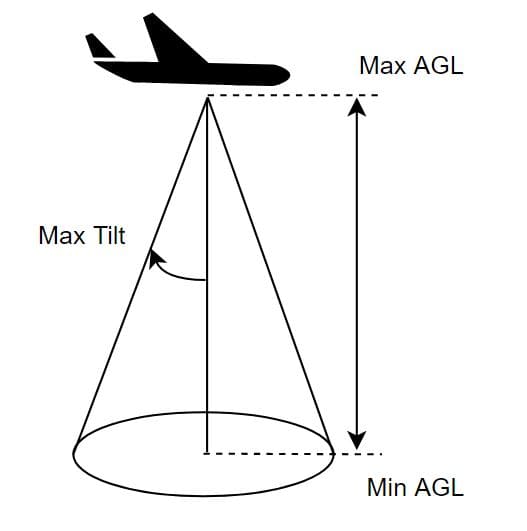
Altimeter Menu - Sensor Limits
Maximum variance: Maximum variance applied to the measurement after measurement lost.
Minimum variance: Minimum variance applied to the measurement after recovering from a measurement lost.
Time to reset variance: Time before considering measurement lost.
Tau (Filter constant): Smoothing parameter for the transition from maximum to minimum variance.
Common implementations of lidar can be found in Lidar Integration.