Technical¶
General description¶
Veronte Autopilot 4x is a triple redundant version of Veronte Autopilot 1x. It includes three complete Autopilot 1x modules fully integrated with dissimilar arbiters for detecting system failures and selecting the module in charge of the control. The autopilot selected has the master controls actuators and communications. The following diagrams summarize the connections between autopilots and the elements of the flight control system.
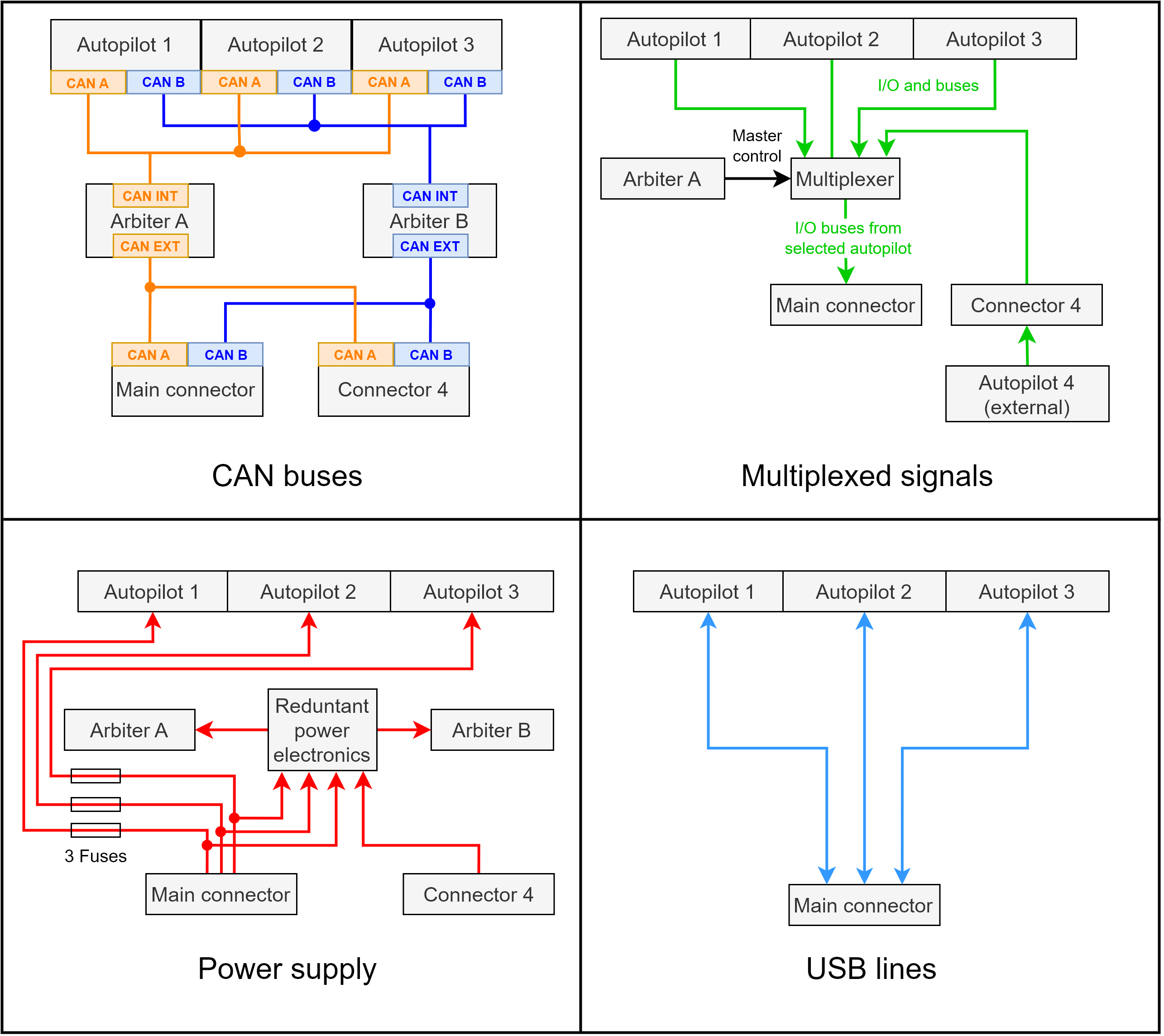
Internal diagrams¶
Important
Apart from CAN buses, all communications are established only with arbiter A (I2C, RS-232, RS-485 and ARINC).
In addition, only arbiter A controls the autopilots multiplexing.
Each Veronte Autopilot 4x contains all the electronics and sensors to properly execute all the functions needed to control the UAV. Autopilot 4x executes in real time guidance, navigation and control algorithms for the carrying airframe. It controls propulsion systems and signals processing from different sensors: accelerometers, gyroscopes, magnetometer, static pressure, dynamic pressure, GNSS and externals.
Additional I/O ports are available for connection of an external control system in case it is required (for example another Autopilot 1x). In case of using an additional control system, it will be included in the redundant scheme. Veronte systems provide the system full dissimilarity for high demanding environments, as required by civil aviation authorities.
Datalink communications can be also redundant, being possible to install inside the autopilot 3 radios with different frequencies. For example, it allows to have two radios working in the 900 MHz frequency and one in 2.4 GHz, so in case there is any issue in the 900 MHz bandwidth the module connected to the 2.4 GHz bandwith will take the control. In addition, an external radio can be controlled as a critical device using the serial port in the redundant connector.
Veronte Autopilot 4x also includes two separate flight termination voting logics, completely dissimilar and implemented with simple hardware, with the purpose of giving the internal three Veronte Autopilots 1x a way to decide by consensus if a flight termination signal should be activated or not. This flight termination signal is employed to activate emergency systems, such as parachutes.
All three modules are managed by a Management Board; it includes voting algorithms to manage the module in charge of vehicle control. This device compares data from all modules in real time and processes it for discarding any autopilot module with undesired performance.
The arbitration algorithm in Veronte Autopilot 4x is based on a scoring system. Each autopilot must send continuously a set of arbitration variables to the arbiters in order to calculate the score for each unit. Then, based on scores and current arbitration mode, the 4x will use the autopilot with the highest score.

Arbitration diagram¶
Variants¶
Variant name |
Reference |
|---|---|
W/O DAA |
P006984 |
With remote ID |
P006146 |
With ADS-B |
P006147 |
Mechanical and Electrical specifications¶
All sensors are located inside the Autopilots 1x. To know their specifications read the Sensor Specifications - Technical section of the 1x Hardware Manual.
Variable |
Value |
|---|---|
Weight |
W/O DAA: 615 g (±2 g) With Remote ID or ADS-B: 632 g (±2 g) With Damping System: + 76 g |
Temperature range |
-40 ºC to 65 ºC |
Protection Rating |
IP67 |
Power input voltage |
6.5 to 36 V |
Power consumption |
Up to 15 W |
Maximum acceleration |
32 g |
Dimensions¶
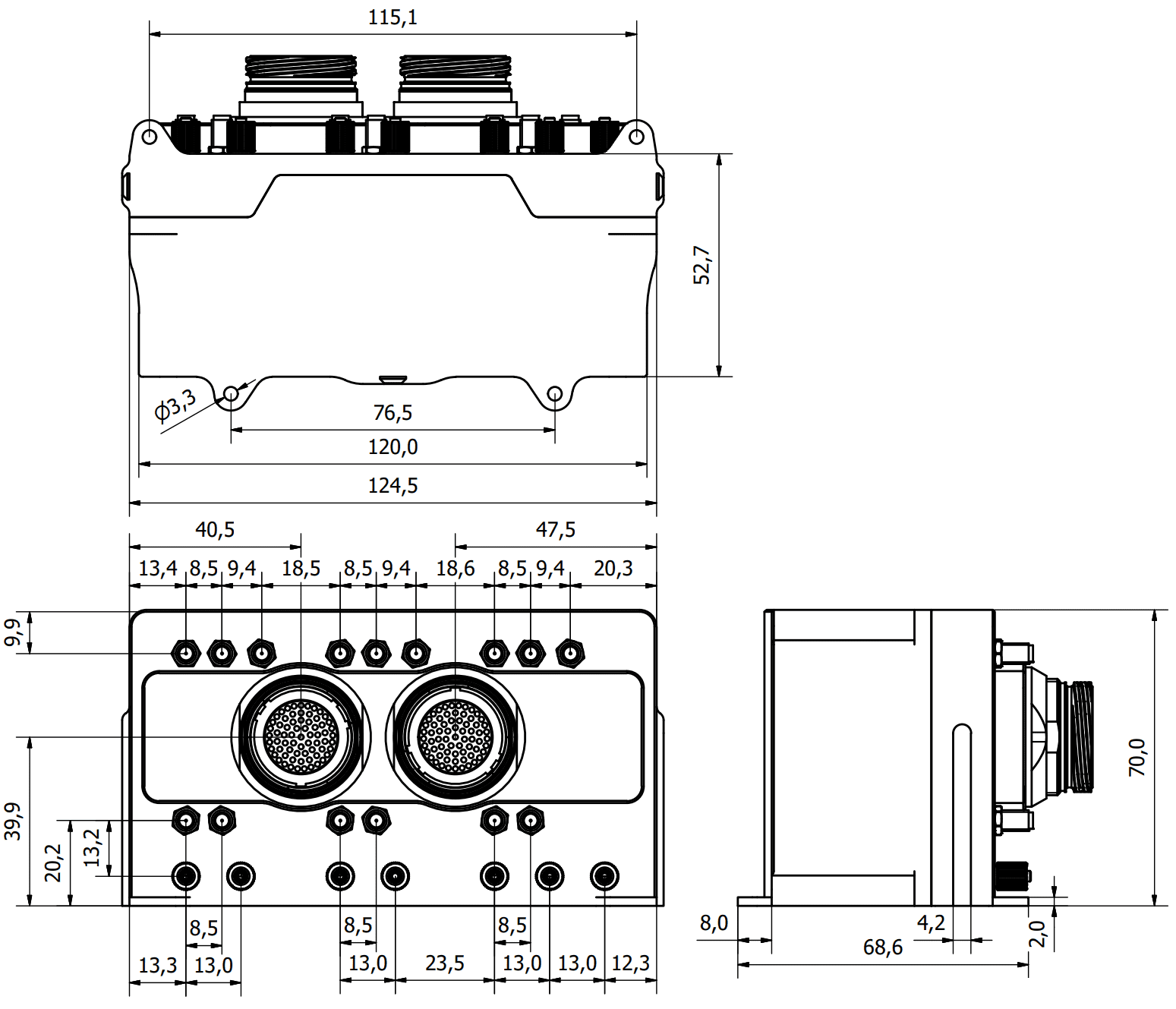
Veronte Autopilot 4x dimensions (mm)¶
M3 screws are recommended for mounting. In saline environments such as coastal and oceanic, the screw material should be stainless steel.
Interfaces¶
Connector layout¶
The three inner Autopilots 1x are connected to the MAIN Connector and the Management Board is connected to Connector 4. In case of using an external autopilot, it must be plugged to the Connector 4 according to the Pinout - Hardware Installation section of this manual.
Each inner Autopilot 1x has asigned a connector block with its respective number. All blocks have the same connectors with the same functions.
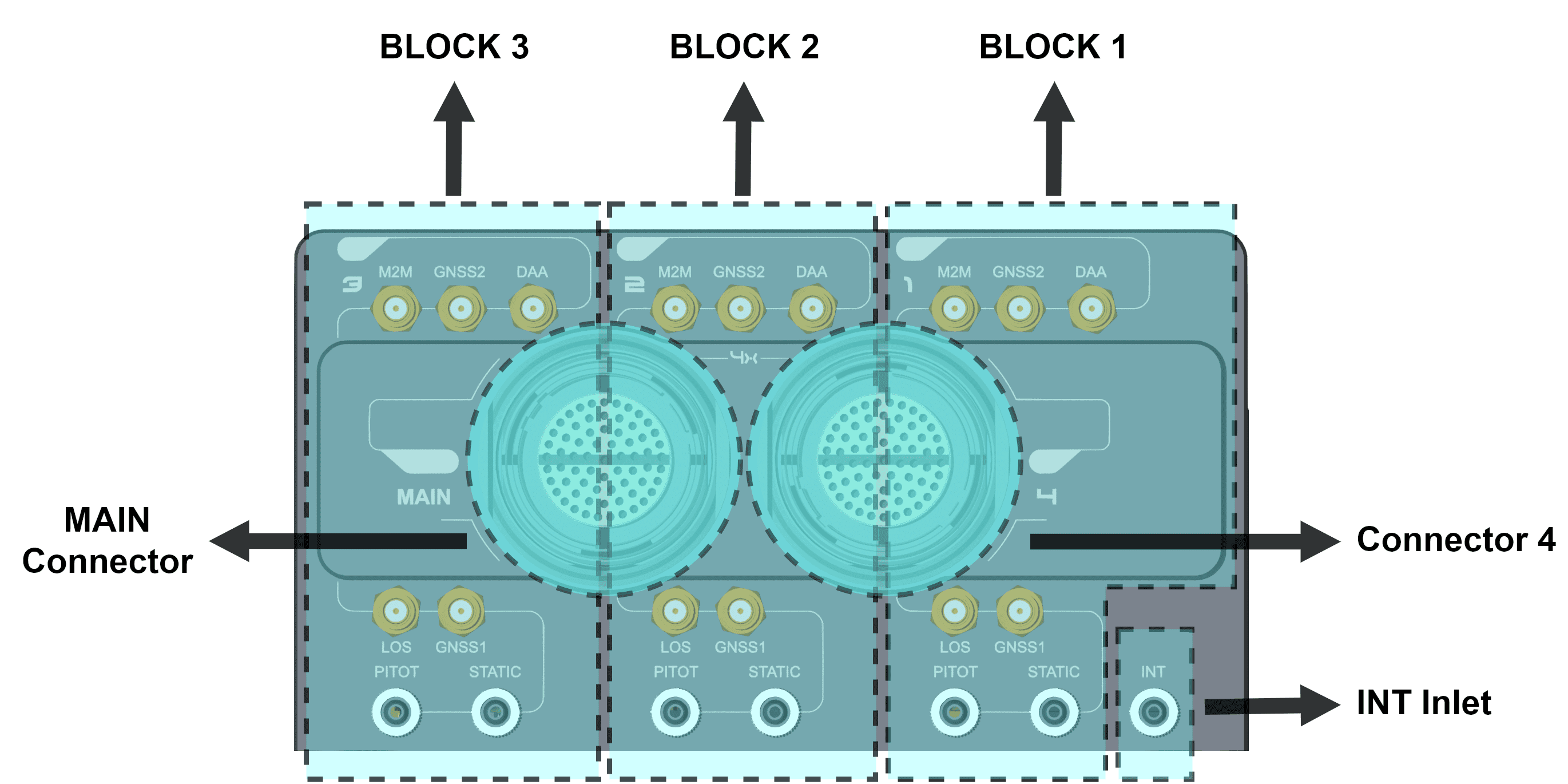
Veronte Autopilot 4x connectors¶
M2M: SSMA connector for machine to machine communication.
Warning
If the BLOS module is enabled, a suitable antenna must be connected to this SSMA port.
The
4G Antennawith the Embention reference P000112 is recommended.GNSS1: SSMA connector for global navigation satellite system 1.
GNSS2: SSMA connector for global navigation satellite system 2.
DAA: SSMA connector for ADS-B or remote ID.
Warning
When using ADS-B or remote ID, there must be an adequate antenna or load connected to the DAA SSMA.
LOS: SSMA connector for line of sight communications.
PITOT: Dynamic pressure port (Int. D. 2.5 mm x Out. D. 4 mm) of each internal autopilot.
STATIC: Static pressure port (Int. D. 2.5 mm x Out. D. 4 mm) for static pressure sensor 1 of each internal autopilot.
INT Inlet: Static pressure port (Int. D. 2.5 mm x Out. D. 4 mm) for static pressure sensor 2. This port is common for all internal autopilots.
Note
Each autopilot employs both static pressure ports for sensor redundancy, then Y tubing connection is strongly recommended.
Warning
The static pressure port STATIC is always used by Autopilot 4x to calculate speed (using the difference of pressure between ports STATIC and PITOT), no matter which sensor is selected in configuration.
Mating connectors¶
Abbreviation |
Autopilot 4x connector |
Mating connector |
|---|---|---|
GNSS |
SSMA Jack female for GNSS antenna |
SSMA male Plug, low-loss cable is recommended. Active Antenna GNSS:
|
DAA |
SSMA Jack female for ADS-B or remote ID |
SSMA male Plug, low-loss cable is recommended |
M2M |
SSMA Jack female for M2M antenna |
|
LOS |
SSMA Jack female for RF antenna |
|
MAIN |
Main Connector HEW.LM.368.XLNP |
Mating connector: FGW.LM.368.XLCT (Embention reference P005550) Mating harnesses:
|
4 |
Connector 4 HER.LM.368.XLNP |
Mating connector: FGR.LM.368.XLCT (Embention reference P005654) Mating harness: Veronte Harness Yellow 68P (Embention reference P001118) |