Hardware Changelog¶
Hereby are described the main differences between the latest release of the Veronte Autopilot 4x hardware (v 1.8) and the previous commercial version (v 1.2).
Note
Note that all the technical differences related to Autopilot 1x are detailed in the Hardware Changelog section of the 1x Hardware Manual.
New funcionalities
Addition of second arbitrer microcontroller
Enhancement hardware detection mechanism for arbiters A and B
Implementation of independent power domains for each microcontroller and different peripherals
USB ID pin has a different functionality, now is the USB shielding connection
5V_BUS and 3.3V_BUS removed from Main connector
Three UARTs (one from each Autopilot 1x) added to the redundant connector
Improvements
Optimized power supply circuit
Pinout changes from Autopilot 4x 1.2¶
The pinout for 1.2 and 1.8 versions are very similar, but they have several differences. To prevent any confusion, the following table shows the pinout for both versions. The different pins are marked with ⚠️, all the rest have the same function.
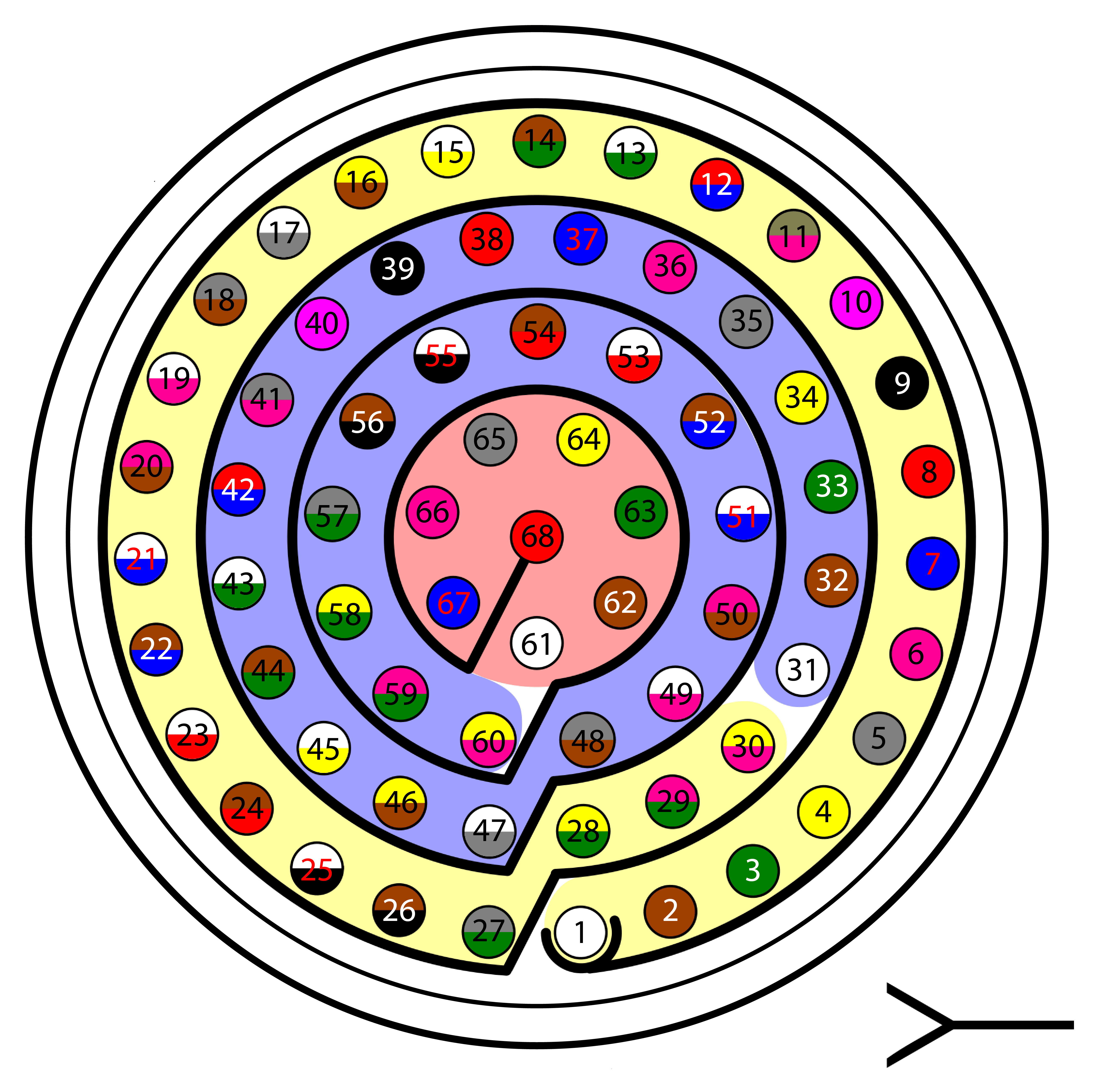
Pinout of Main and Arbiter connectors for both versions¶
Main Connector pinout¶
PIN |
Signal |
Type |
Internal Power Domain |
Description |
|---|---|---|---|---|
1 |
I/O_0_MUXED |
I/O |
A |
MUXED PWM / Digital I/O signal (0-3.3V) Warning Each pin withstands a maximum current of 1.65 mA. |
2 |
I/O_1_MUXED |
I/O |
B |
|
3 |
I/O_2_MUXED |
I/O |
A |
|
4 |
I/O_3_MUXED |
I/O |
B |
|
5 |
I/O_4_MUXED |
I/O |
A |
|
6 |
I/O_5_MUXED |
I/O |
B |
|
7 |
I/O_6_MUXED |
I/O |
A |
|
8 |
I/O_7_MUXED |
I/O |
B |
|
9 |
GND* |
GROUND |
Ground pin for signals 1-8 |
|
10 |
I/O_8_MUXED |
I/O |
A |
MUXED PWM / Digital I/O signal (0-3.3V) Warning Each pin withstands a maximum current of 1.65 mA. |
11 |
I/O_9_MUXED |
I/O |
B |
|
12 |
I/O_10_MUXED |
I/O |
A |
|
13 |
I/O_11_MUXED |
I/O |
B |
|
14 |
I/O_12_MUXED |
I/O |
A |
|
15 |
I/O_13_MUXED |
I/O |
B |
|
16 |
I/O_14_MUXED |
I/O |
A |
|
17 |
I/O_15_MUXED |
I/O |
B |
|
18 |
GND* |
GROUND |
Ground pin for signals 10-17 |
|
19 |
MUXED_RS232_TX |
OUTPUT |
A |
MUXED RS-232 output |
20 |
MUXED_RS232_RX |
INPUT |
A |
REDUNDANT RS-232 input |
21 |
V2_USB_DP |
I/O |
Autopilot 2 USB positive data line |
|
22 |
ANALOG_3 |
INPUT |
B |
REDUNDANT analog input (0-36V) |
23 |
ANALOG_4 |
INPUT |
B |
|
24 |
V2_USB_DN |
I/O |
Autopilot 2 USB negative data line |
|
25 |
CANA_ARB_P |
I/O |
A |
CAN-bus interface. It supports data rates up to 1 Mbps. A 120 Ohm Zo is required and twisted pair is recommended. |
26 |
CANA_ARB_N |
I/O |
A |
|
27 |
GND* |
GROUND |
GROUND pin for buses (except USB) |
|
28 |
CANB_ARB_P |
I/O |
CAN-bus interface. It supports data rates up to 1 Mbps. A 120 Ohm Zo is required and twisted pair is recommended |
|
29 |
CANB_ARB_N |
I/O |
||
⚠️ 30 |
|
|
|
|
|
|
|
||
31 |
I2C_CLK |
OUTPUT A |
MUXED Clock line for I2C bus (0.3V to 3.3V) |
|
32 |
I2C_DATA |
I/O |
A |
MUXED data line for I2C bus |
33 |
GND* |
GROUND |
Ground for 3.3V power supply |
|
⚠️ 34 |
|
|
B |
|
|
|
|
||
⚠️ 35 |
|
|
|
|
|
|
|
||
⚠️ 36 |
|
|
B |
|
|
|
|
||
⚠️ 37 |
|
|
|
|
|
|
|
||
38 |
ANALOG_0 |
INPUT |
A |
REDUNDANT analog input (0-36V) |
39 |
ANALOG_1 |
INPUT |
A |
|
40 |
ANALOG_2 |
INPUT |
A |
|
41 |
GND* |
GROUND |
Ground signal for buses |
|
42 |
V3_USB_DP |
I/O |
Autopilot 3 USB positive data line |
|
43 |
V3_USB_DN |
I/O |
Autopilot 3 USB negative data line |
|
44 |
GND* |
GROUND |
Ground signal for buses |
|
⚠️ 45 |
|
|
B |
|
|
|
|
||
⚠️ 46 |
|
|
B |
|
|
|
|
||
47 |
GND* |
GROUND |
Ground signal for buses |
|
48 |
||||
⚠️ 49 |
|
|
|
|
|
|
|
||
50 |
OUT_RS485_P |
OUTPUT |
B |
MUXED non-inverted output RS-485 bus |
51 |
OUT_RS485_N |
OUTPUT |
B |
MUXED inverted output RS-485 bus |
52 |
IN_RS485_N |
INPUT |
REDUNDANT inverted inout RS-485 bus |
|
53 |
IN_RS485_P |
INPUT |
REDUNDANT non-inverted input RS-485 bus |
|
54 |
RS485_GND |
GROUND |
Ground for RS-485 bus |
|
55 |
EQEP_A |
INPUT |
A for autopilots 1 and 2 B for autopilot 3 |
Encoder quadrature redundant input A (0-5V) |
56 |
EQEP_B |
INPUT |
Encoder quadrature redundant input B (0-5V) |
|
57 |
EQEP_S |
INPUT |
Encoder strobe redundant input (0-5V) |
|
58 |
EQEP_I |
INPUT |
Encoder index redundant input (0-5V) |
|
59 |
GND* |
GROUND |
Autopilot 3 ground pin |
|
60 |
V1_USB_DP |
I/O |
Autopilot 1 USB positive data line |
|
61 |
V1_USB_DN |
I/O |
Autopilot 1 USB negative data line |
|
⚠️ 62 |
|
|
|
|
|
|
|
||
63 |
GND* |
GROUND |
Ground signal for buses |
|
64 |
BAT_2 |
POWER |
Autopilot 3 power supply (6.5 to 36V) |
|
65 |
GND* |
GROUND |
Autopilot 2 ground pin |
|
66 |
GND* |
GROUND |
Autopilot 1 ground pin |
|
67 |
BAT_1 |
POWER |
Autopilot 2 power supply (6.5 to 36V) |
|
68 |
BAT_0 |
POWER |
Autopilot 1 power supply (6.5 to 36V) |
Warning
Common grounds are marked with *.
Arbiter Connector pinout¶
Although being the same component, Main Connector and Arbiter connector are polarized differently, but they have different mechanical connections to avoid wiring swapping.
PIN |
Signal |
Type |
Internal Power Domain |
Description |
|---|---|---|---|---|
1 |
I/O_0_EXTERNAL |
I/O |
A |
External MUXED PWM / Digital I/O signal (0-3.3V). In case of employing an additional external autopilot, its pins I/XX must be connected here. Each signal I/O_XX_EXTERNAL will be sent to I/XX of Main Connector if the arbiter commands it. Warning Input current must be limited to 25 mA for each I/O EXTERNAL pin. |
2 |
I/O_1_EXTERNAL |
I/O |
B |
|
3 |
I/O_2_EXTERNAL |
I/O |
A |
|
4 |
I/O_3_EXTERNAL |
I/O |
B |
|
5 |
I/O_4_EXTERNAL |
I/O |
A |
|
6 |
I/O_5_EXTERNAL |
I/O |
B |
|
7 |
I/O_6_EXTERNAL |
I/O |
A |
|
8 |
I/O_7_EXTERNAL |
I/O |
B |
|
9 |
I/O_8_EXTERNAL |
I/O |
A |
|
10 |
I/O_9_EXTERNAL |
I/O |
B |
|
11 |
I/O_10_EXTERNAL |
I/O |
A |
|
12 |
I/O_11_EXTERNAL |
I/O |
B |
|
⚠️ 13 |
|
|
|
|
|
|
|
||
14 |
EXTERNAL_ANALOG_0 |
OUTPUT |
A |
External analog signal (0-3V). This is the analog signal from ANALOG_0 on Main Connector, which is reduced from 0-36V to 0-3V. |
15 |
EXTERNAL_ANALOG_1 |
OUTPUT |
A |
External analog signal (0-3V). This is the analog signal from ANALOG_1 on Main Connector, which is reduced from 0-36V to 0-3V. |
16 |
EXTERNAL_ANALOG_2 |
OUTPUT |
A |
External analog signal (0-3V). This is the analog signal from ANALOG_2 on Main Connector, which is reduced from 0-36V to 0-3V. |
17 |
EXTERNAL_ANALOG_3 |
OUTPUT |
B |
External analog signal (0-3V). This is the analog signal from ANALOG_3 on Main Connector, which is reduced from 0-36V to 0-3V. |
18 |
FTC_VOTING_B |
OUTPUT |
B |
This pin is an open drain output (0 - 48V), which is open or connected to GND depending on the FTS signals of the Autopilots 1x. This logic is implemented at the Voting Stage, explained in detail in the Flight Termination System section of this manual. Use this pin for an emergency device; for example the ground of a relay that activates a parachute. FTC_VOTING_A (pin 53) and FTC_VOTING_B (pin 18) do the same function, but they have dissimilarity. |
19 |
EXT_RS232_TX |
INPUT |
A |
In case of employing an additional external autopilot, its pin RS 232 TX must be connected here. If arbiter decides to multiplex this signal, it will be transmitted to MUXED_RS232_TX on Main Connector with RS232 protocol. |
20 |
EXT_RS232_RX |
OUTPUT |
A |
In case of employing an additional external autopilot, its pin RS 232 RX must be connected here. If arbiter decides to multiplex this signal, it will be transmitted to MUXED_RS232_TX on Main Connector with RS232 protocol. |
21 |
IN_RS485_P |
OUTPUT |
This pin is connected with IN_RS485_P from Main Connector |
|
22 |
IN_RS485_N |
OUTPUT |
This pin is connected with IN_RS485_N from Main Connector |
|
23 |
EXT_OUT_RS485_P |
INPUT |
B |
In case of employing an additional external autopilot, its pin OUT_RS485_P must be connected here. If arbiter decides to multiplex this signal and EXT_DETECT of Arbiter Connector is connected to GND, it will be transmitted to OUT_RS485_P on Main Connector with RS232 protocol |
24 |
EXT_OUT_RS485_N |
INPUT |
B |
In case of employing an additional external autopilot, its pin OUT_RS485_N must be connected here. If arbiter decides to multiplex this signal and EXT_DETECT of Arbiter Connector is connected to GND, it will be transmitted to OUT_RS485_N on Main Connector with RS232 protocol |
25 |
CANA_P_ARB_A |
I/O |
This pin is connected with CANA_ARB_P from Main Connector |
|
26 |
CANA_N_ARB_A |
I/O |
This pin is connected with CANA_ARB_N from Main Connector |
|
⚠️ 27 |
|
|
|
|
|
|
|
||
28 |
CANB_P_ARB_B |
I/O |
This pin is connected with CANB_ARB_P from Main Connector |
|
29 |
CANB_N_ARB_B |
I/O |
This pin is connected with CANB_ARB_N from Main Connector |
|
30 |
OUT_RS485_ARB_P |
OUTPUT |
A |
Non-inverted output for arbiter A RS-485 bus |
31 |
OUT_RS485_ARB_N |
OUTPUT |
A |
Inverted output for arbiter A RS-485 bus |
32 |
IN_RS485_ARB_N |
INPUT |
A |
Inverted output for arbiter A RS-485 bus |
33 |
IN_RS485_ARB_P |
INPUT |
A |
Non-inverted input for arbiter A RS-485 bus |
34 |
TX_OUT_P |
OUTPUT |
A |
Arbiter A ARINC positive output |
35 |
TX_OUT_N |
OUTPUT |
A |
Arbiter A ARINC negative output |
36 |
RIN1_ARINC_P |
INPUT |
A |
Arbiter A ARINC positive input |
37 |
RIN1_ARINC_N |
INPUT |
A |
Arbiter A ARINC negative input |
38 |
GND* |
GROUND |
Ground pin for buses |
|
39 |
SCL_A_OUT_ARB |
OUTPUT |
A |
Clock signal for arbiter A I2C bus |
40 |
SDA_A_OUT_ARB |
I/O |
A |
Data signal for arbiter A I2C bus |
41 |
DSP_232_RX_B |
INPUT |
A |
Arbiter A RS-232 input B |
42 |
DSP_232_TX_B |
OUTPUT |
A |
Arbiter A RS-232 output B |
43 |
DSP_232_RX_A |
INPUT |
A |
Arbiter A RS-232 input A |
44 |
DSP_232_TX_A |
OUTPUT |
A |
Arbiter A RS-232 output A |
45 |
GND* |
GROUND |
Ground pin for analog signals |
|
46 |
ARBITER_ANALOG_0 |
INPUT |
A |
Arbiter A analog input (0-36V) |
47 |
ARBITER_ANALOG_1 |
INPUT |
A |
|
48 |
ARBITER_ANALOG_2 |
INPUT |
A |
|
49 |
ARBITER_ANALOG_3 |
INPUT |
A |
|
50 |
ARBITER_ANALOG_4 |
INPUT |
A |
|
51 |
ARBITER_ANALOG_5 |
INPUT |
A |
|
52 |
ARBITER_ANALOG_6 |
INPUT |
A |
|
53 |
FTC_VOTING_A |
OUTPUT |
A |
This pin is an open drain output (0 - 48V), which is open or connected to GND depending on the FTS signals of the Autopilots 1x. This logic is implemented at the Voting Stage, explained in detail in the Flight Termination System section of this manual. Use this pin for an emergency device; for example the ground of a relay that activates a parachute. FTC_VOTING_A (pin 53) and FTC_VOTING_B (pin 18) do the same function, but they have dissimilarity. |
54 |
GPIO_8_ARB |
I/O |
A |
Arbiter A PWM / digital I/O signal (0-3.3V) |
55 |
GPIO_9_ARB |
I/O |
A |
|
56 |
WD_EXT |
INPUT |
A |
Watchdog signal from external autopilot to arbiter A (0-3.3V) |
57 |
EXT_DETECT |
INPUT |
A |
Connect to GND if external autopilot is connected, otherwise keep open |
58 |
GND* |
GROUND |
Ground signal for GPIO |
|
59 |
GPIO_0_ARB |
I/O |
A |
Arbiter A PWM / digital I/O signal (0-3.3V) |
60 |
GPIO_1_ARB |
I/O |
A |
|
61 |
GPIO_2_ARB |
I/O |
A |
|
62 |
GPIO_3_ARB |
I/O |
A |
|
63 |
GPIO_4_ARB |
I/O |
A |
|
⚠️ 64 |
|
|
A |
|
|
|
A |
|
|
⚠️ 65 |
|
|
A |
|
|
|
A |
|
|
⚠️ 66 |
|
|
A |
|
|
|
A |
|
|
67 |
GND* |
GROUND |
Management Board ground |
|
68 |
VCC_ARBITER |
POWER |
Power supply for Management Board (6.5 to 36 V) |
Warning
Common grounds are marked with *.