Introduction¶

Veronte Autopilot 4x¶
Veronte Autopilot 4x is a miniaturized high reliability avionics system for advanced control of unmanned systems. This control system embeds a state-of-the-art suite of sensors and processors together with LOS and BLOS M2M datalink radio, all with reduced size and weight.
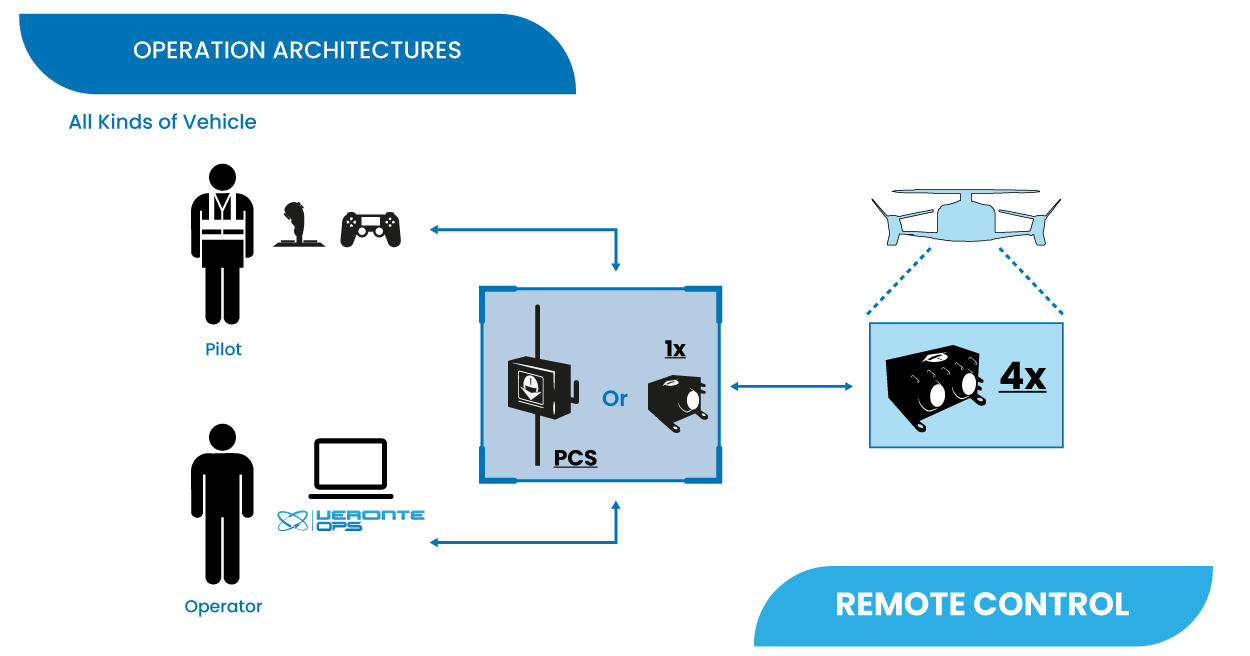
Veronte Autopilot 1x is designed to control any unmanned vehicle, either aircraft such as: multirotors, helicopters, airplanes, VTOL, blimps… as well as ground vehicles, surface vehicles or many others. Custom flight phases and control channels provide support for any aircraft layout and performance by using the same software and hardware for: UAS, RPAS, Drone, USV / ASV, UGV…
Applications¶
Autopilot 4x allows aircrafts to perform sensitive flight missions and transport valuable payloads with advanced safety conditions and high reliabilty. By installing a triple redundant core it is possible to extend the mean time between failures in systems. This control module is also suitable for both, fail-safe and fail-operational missions, extending the operability of the system.
Control diagram¶
Veronte Autopilot 4x is a triple redundant version of Veronte Autopilot 1x. It includes three complete Veronte Autopilot modules fully integrated with dissimilar arbiters to detect system failures and select the module in charge of control. In worst case scenario, if arbiters do not emit any control signal, the Autopilot 1x number 1 will take the control of the aircraft.
Each Autopilot 1x receives all signals, but only the selected one sends information through multiplexed channels. Arbiters select which 1x will control the aircraft (and send signals) using watchdog messages. In addition, it is possible to connect an external fourth autopilot.
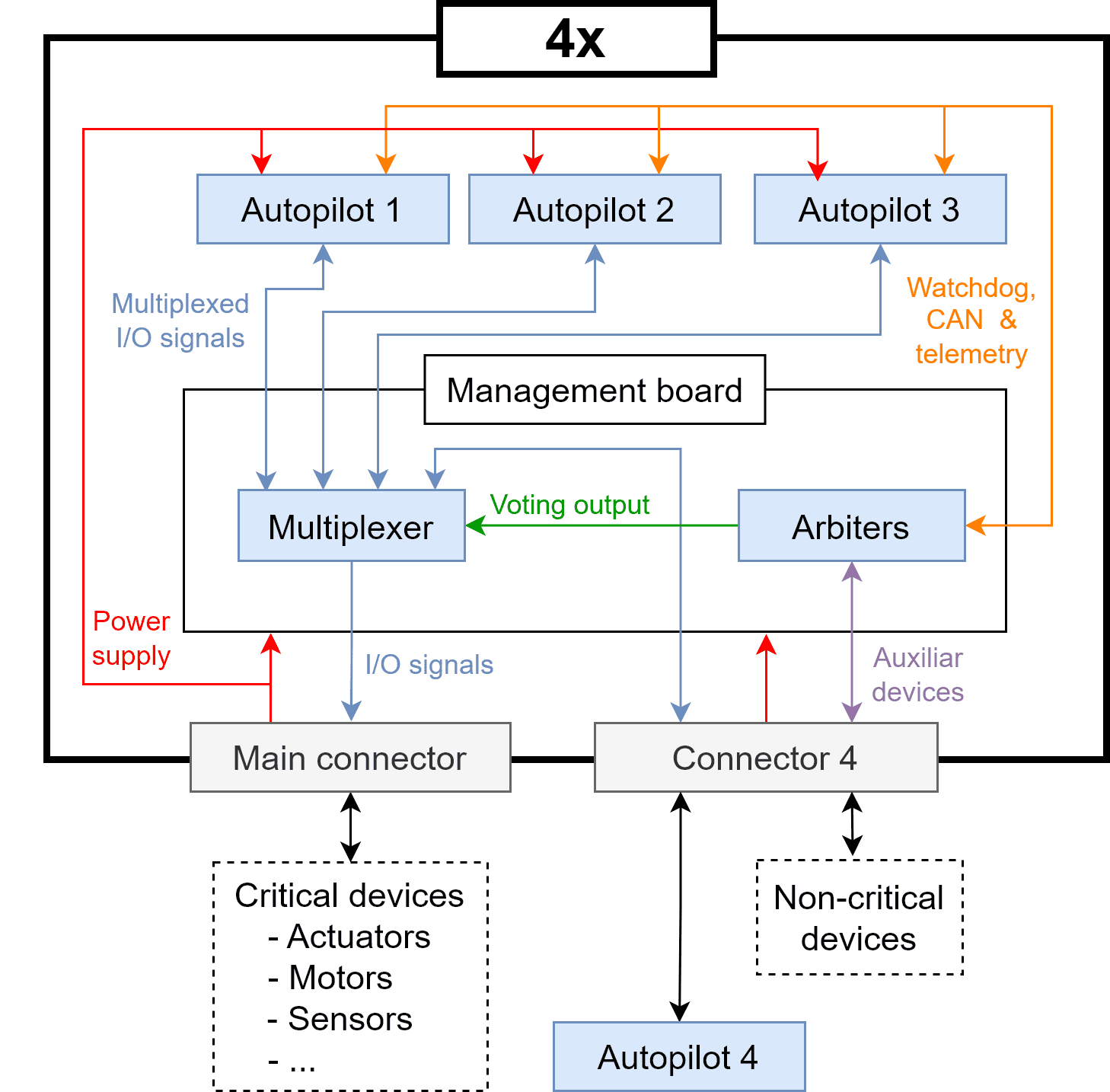
General diagram¶