Adaptative-Predictive Control¶
This controller incorpores an algorithm for self-tuning i.e, the controller settings are ajusted automatically.
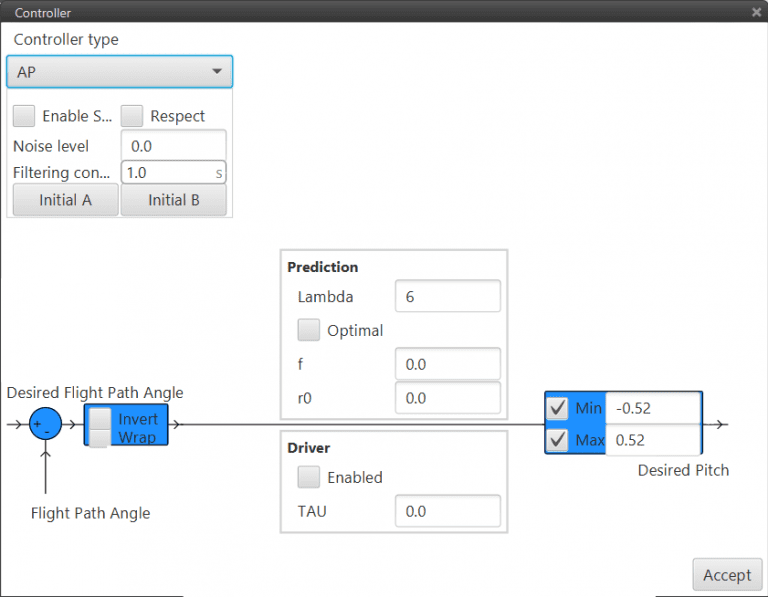
PID Mathematical Model - Adaptative Predictive controller configuration
The next table describes all the parameters available and what means each one of them.
Field |
Description |
|---|---|
Enable Sys ID |
Activates the option of system identification. The plant is modified continuously by predicting a new one according to a set of parameters. This option must be activated when working in Adaptative – Predictive control. |
Noise Level |
Supposed noise level during System Identification |
Filtering Constant |
Constant value for the filter |
Initial A & Initial B |
Used to establish the initial plants constants for the system identification process |
Lambda |
Parameter that defines the control aggressiveness. High value means less aggressive control, low lambda means more aggressive control |
Optimal |
Select this option to use the Optimal AP algorithm |
f |
Sampling input period |
ro |
Control output period |
Enable/Disable Driver |
Mark this option to use the Driver Block |
TAU |
Time constant for the desired default trajectory |
In addiction, it is possible to display an AP panel in the workspace that allows the user to perform the following actions:
Initial to Current: to set the initial platform model to the current one.
Current to Initial: to save the actual model to the initial one
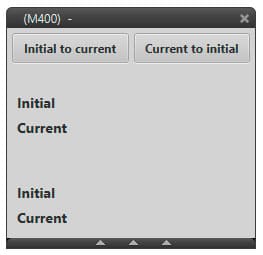
PID Mathematical Model - AP Tool in Workspace