Navigation¶
This menu contains the parameters used in the Kalman Filter algorithm to fuse the information provided by the different sensors. This data is used in the navigation system to generate the commands sent to the aircraft.
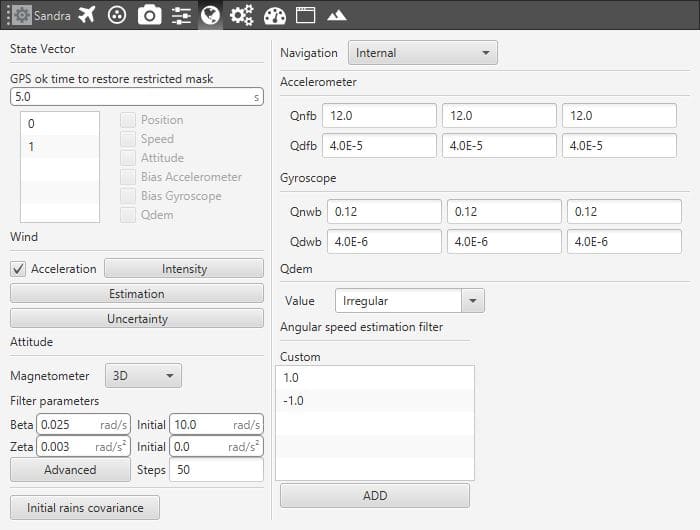
Navigation Parameters
Veronte integrates a navigation system which can operate with GPS and without GPS coverage. In the navigation with GPS, the system uses it to make the aircraft fly a route or towards a certain waypoint. It is possible to control the aircraft position (longitude and latitude) and the altitude. This is the navigation used by default, the one that the system uses when everything is working properly.
In case the GPS signal is lost, the navigation can easly measures the attitude angles with a greater precision than using a simple IMU. With these measures, it is possible for the system to control the pitch, roll and yaw and then keep a safe attitude when the GPS signal is lost, avoiding any possible malfunction. It is recommended to create an automation to change to a phase where the attitude angles are controlled, in the case of a loss of GPS signal. For more information visit Automations.
Note: the yaw can be measured in the navigation without GPS only if the magnetometer is activated in the navigation window.
Warning
The values that appear here should only be changed by advanced users. If you are not familiar with the Kalman Filter algorithm and Sensor Fusion do not change the default parameters.