Mission Phases¶
In this section, it will be explained the M400 typical mission profile and the mission phases will be detailed.
Standby¶
Standby phase is a preliminary phase of the operation. The guidance is simply a Hold with no change. Normally, the automation which allows the system to pass to Standby phase requires the GPS signal.
Standby phase panel
Takeoff¶
Take-off phase is composed of two Guidances: VTol and Yaw. The first one is a vertical guidance and where following parameters are set:
Line attraction: 8.0 [m].
Set Speed: 1.0 [m/s].
Horizontal Hover Gain: 0.34.
Vertical Hover Gain: 0.1.
Safe Distance: -10 [m] and Relative (Positive down). With this value the platform will ascend.
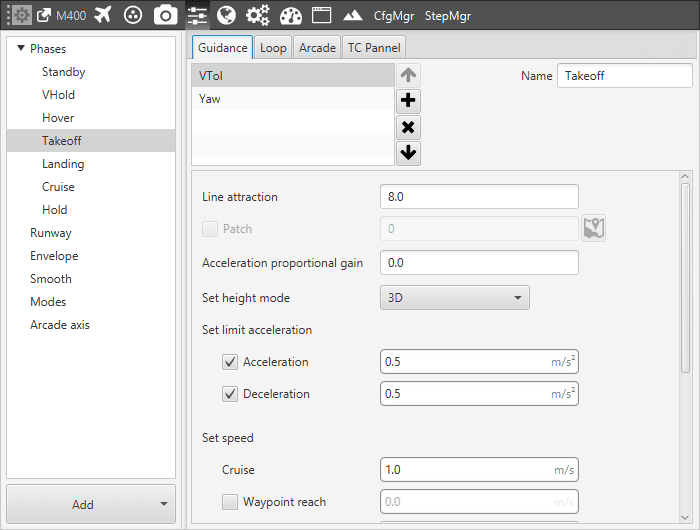
VTol panel
Yaw guidance allows choosing the M400 orientation during takeoff:
Mode: set to Current.
Limit rate: limited rotation speed of 0.6 [rad/s].
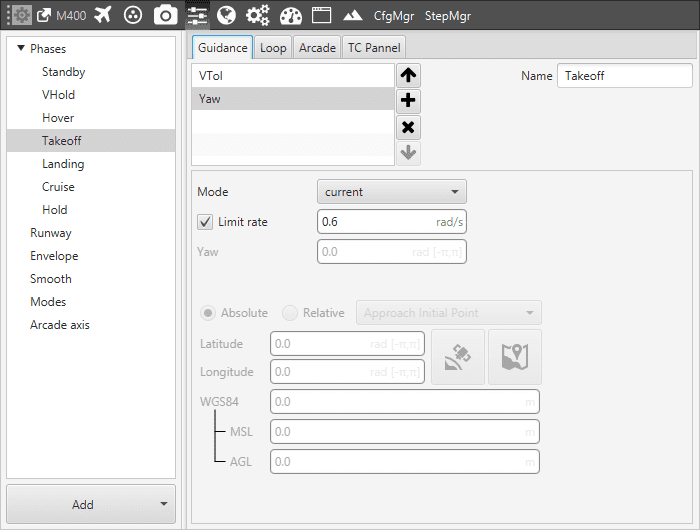
Yaw panel
Hover¶
Hover phase is configured to allow the multicopter maintain the position in the air.
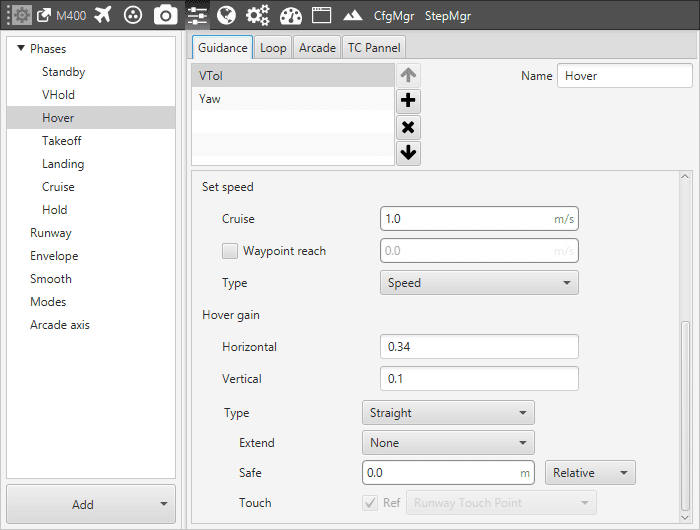
Hover phase panel
The Guidance is a VTol as the one in Take Off phase but, in this case:
Safe distance: set at 0 [m] and Relative.
Horizontal Hover Gain: 0.34.
Vertical Hover Gain: 0.1.
The Yaw guidance is the same of the Take Off phase.
Cruise¶
In this phase, the Guidances are Cruise and Yaw.
The parameters to set are the Cruise Speeds (Cruise and Waypoint reach) and Acceleration limits.
Acceleration limit: 0.5.
Deceleration limit: 0.5.
Cruise Speed: 3.0 [m/s].
Waypoint reach: 0.5 [m/s].
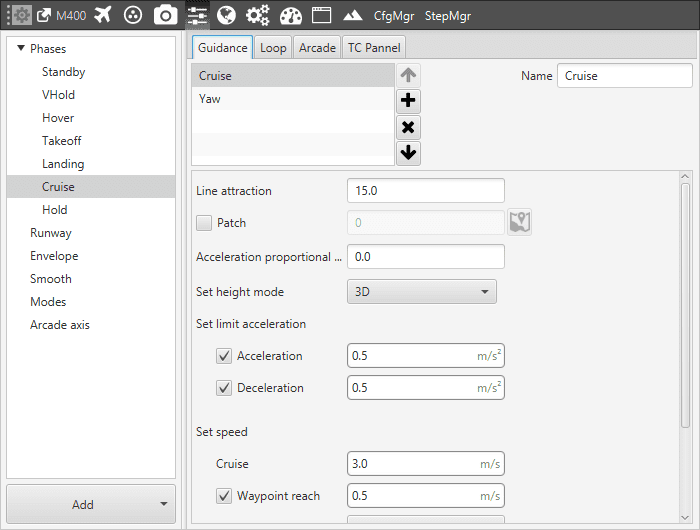
Cruise panel
Yaw Guidance is set in order to make the multicopter controlling yaw angle following the heading angle.
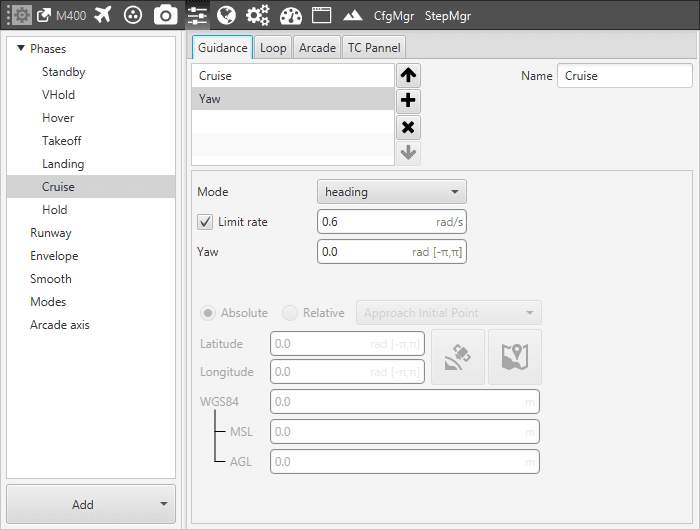
Yaw Guidance panel
Landing¶
This phase has the same settings of the Take-off with some changes.
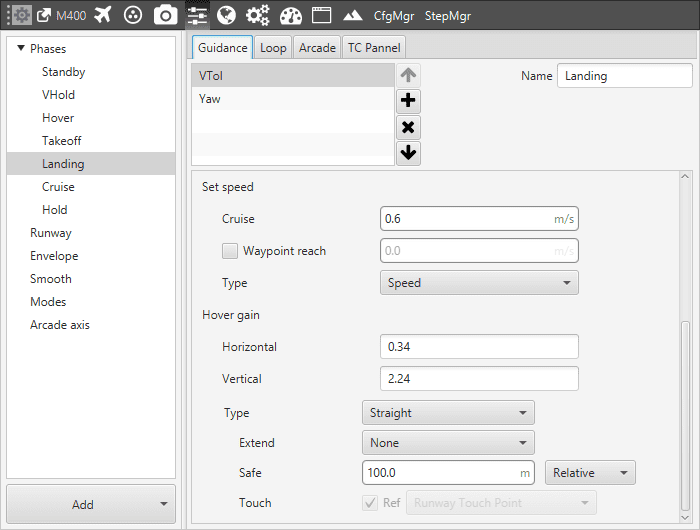
Landing phase panel
Line Attraction: kept at 8.
Set Speed-Cruise: 0.6 [m/s].
Horizontal Hover Gain: 0.34.
Vertical Hover Gain: 2.24.
Safe Distance: 100.0 [m] and Relative (Positive Down). In this case, we are supposing that at the instant when the Landing phase starts, the multicopter is flying at AGL<100m. It is possible select Extend – Down and the aircraft will descend till user desire.
Yaw Guidance is configured in order to let the quadcopter with the Current yaw angle and limiting the yaw rate at 0.6 [rad/s].
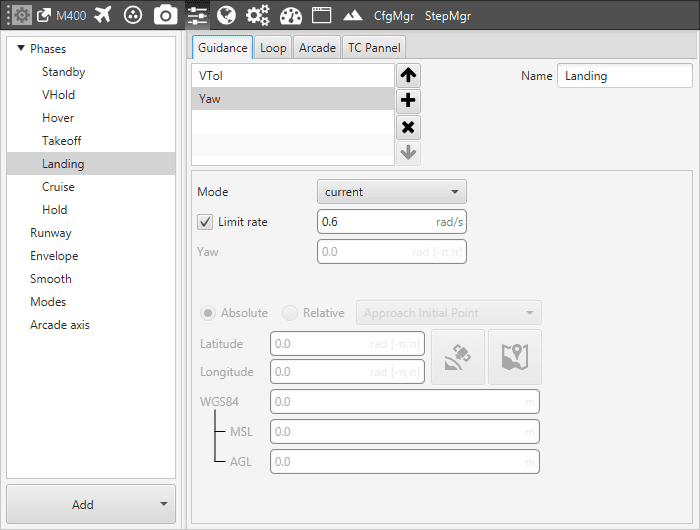
Yaw Guidance panel
VHOLD¶
VHold phase is used to perform a Stick controlled flight. The phase guidance is composed of Hold and Yaw guidances.
Hold guidance is used to keep the following values at a specific value:
Desired D0wn GV: at 0.0 [m/s].
Desired Lateral GV: at 0.0 [m/s].
Desired Front GV: at 0.0 [m/s].
In this way, if the stick control is not active, the multicopter will keep its position in the air without the need of phase changing.
Yaw Guidance is set on Current. In this phase, the Arcade allows controlling the platform depending on the set gains.
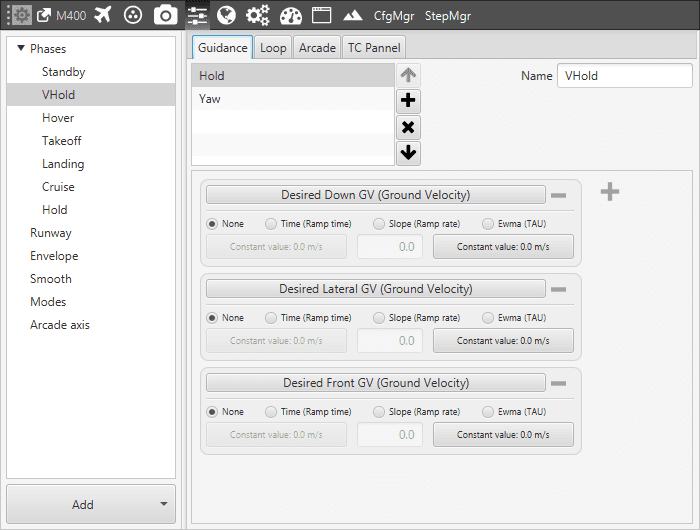
Manual phase panel
Return to Home¶
This operation is used to make a multicopter return to a point, considering it as Home. In order to perform this, is necessary to create two automations and a new phase, all process is explained below.
First create an Automation to save the current position, this has to be the one where the aircraft take-off (Home). This action can be added when creating the Take Off Button. See section Veronte Panel Buttons for more information about creating a button.
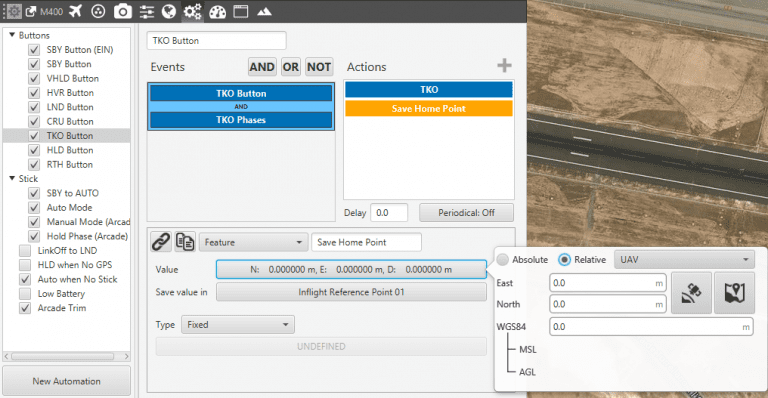
Automation – TKO Button
It is only necessary to add the action Feature and configure it as shown below:
Value: select Relative and UAV. The parameters of position have to be set to 0, it means that the value to save is the UAV position.
Save Value in: select Inflight Reference Point.
Type: fixed.
The following step consists in creating a new phase. This phase can be named as Return to Home and it is necessary to include two guidances VTol and Yaw. VTol guidance has to be configured as follow:
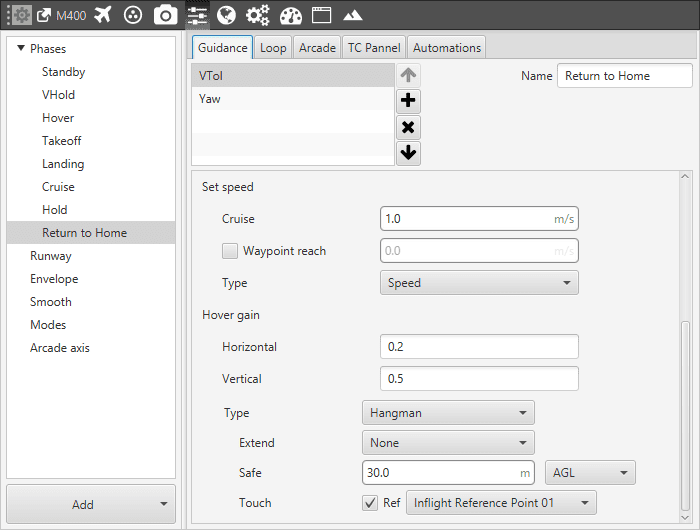
Phase – Return to Home
See section VTOL Guidance for more information about configuring this guidance. It is worth noting the following parameters:
Type: Hangman is selected.
Extend: None
Safe: 30 [m] and AGL, this means that the aircrat will perfom the Hangman path reaching an altitude of 30 [m] AGL.
Touch: here is defined the point where the platform will touch ground. This has been defined in the first step (Inflight Reference Point) and now it is possible to select it.
Yaw guidance can be set to current and user may want to limit the rate.
The last step consits in the creation of a Button on the Veronte panel. Go to Automation Panel and create the following Events and Actions.
Two events have to created: Phase and Button.
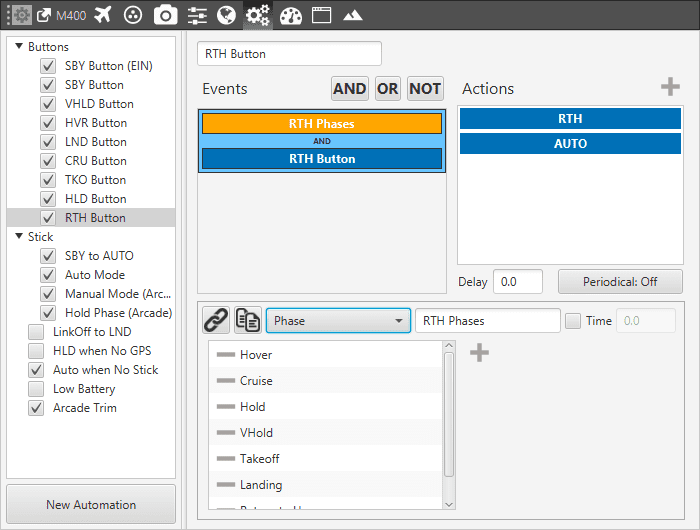
Automation
The actions configured are:
Phase: here is selected the phase that the platform will enter in i.e, Return To Home.
Mode: AUTO is selected.
Finally, user only have to click on the Button which appear on Veronte Panel to perform a Return Home.