Mission Phases¶
In this section, it will be explained the Hybrid typical mission profile and the mission phases will be detailed. The common phases of Quadcopter and Plane are:
Standby
Transition Quad to Plane
Transition Plane to Quad
For all the other phases, the flight type will be specified.
Standby¶
Standby phase is a preliminary phase of the operation. Normally, the automation which allows the system to pass to Standby phase requires the GPS signal.
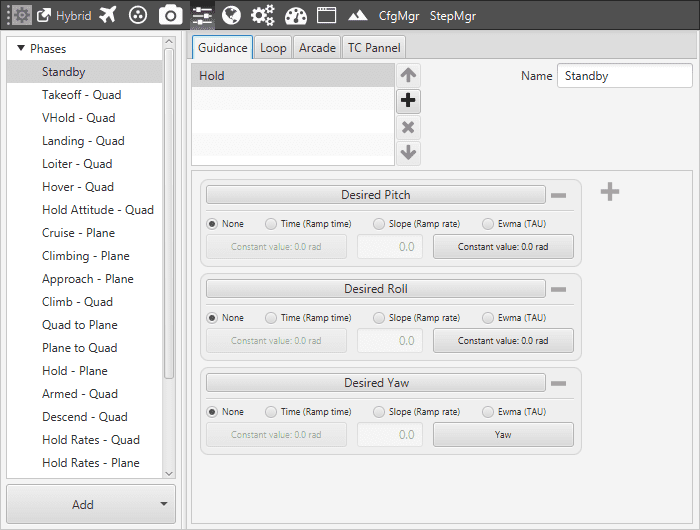
Standby phase panel
The guidance is a Hold of three variables:
Desired Pitch and Roll angles: at 0 [rad].
Desired Yaw angle: set at the current.