System Variables¶
Names¶
This menu is used to set a custom name for one of the system variables.
Click on the Custom Name cell of the desired variable and introduce the new name for it.
When the name is introduced press Enter to store the name on the system.
Press Save to save all changes.
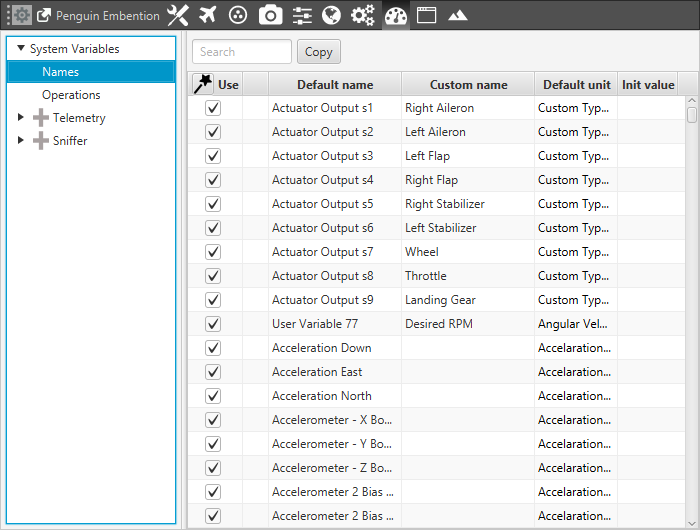
Variable Name Customization
Name |
Type |
Size |
|---|---|---|
U |
Unsigned int |
16 |
R |
Float |
32 |
B |
Bit |
1 |
Operations
It is possible to configure custom operations to be performed in Veronte by selecting the input and output variables and operation parameters. For instance, in this menu it is possible to configure a Lidar sensor, converting the variable measured (voltage) into a physical variable.
The menu shown in the following figure allows the user to create operations with the system variables.
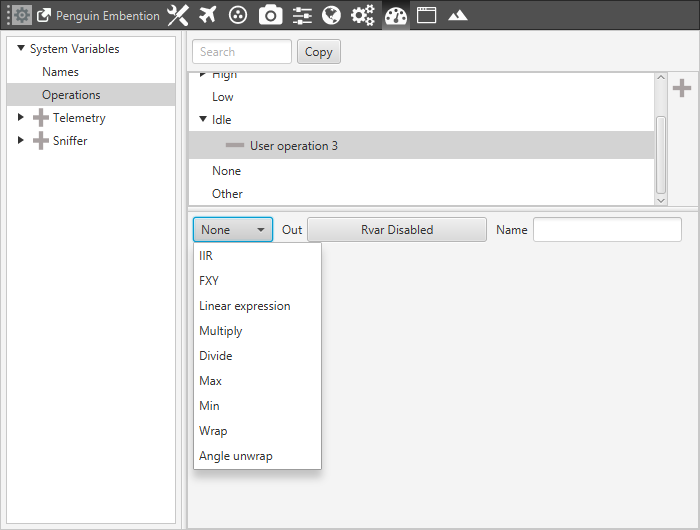
Operations Menu
Super high, High, Low and Idle are the different processing velocities for the tasks performen in Veronte Autopilot (the workin frequencies for each one of them are indicated in Devices/Veronte/Frequencies). By default, the new operation appears in Idle, but it can be moved to another option just dragging it to the desired place.
When creating a new operation, the following types are available in Pipe.
IIR: IIR digital filter, enter the parameters for filtering the variable value.
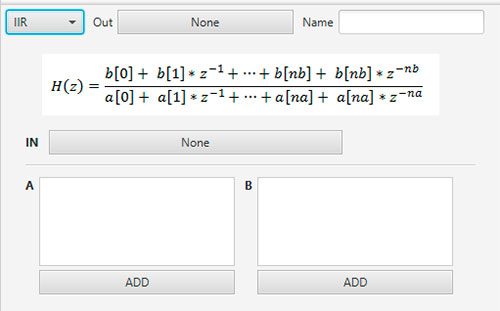
IIR
FXY: FXY matrix, complete the table for setting an output value according to two input ones.
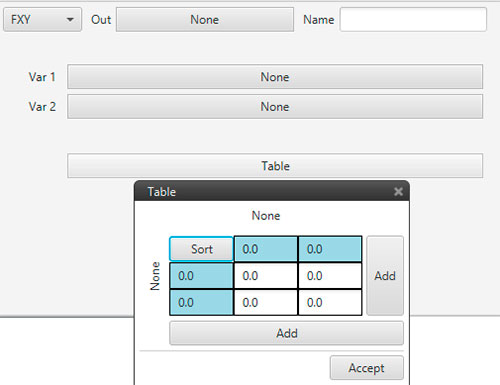
FXY
Linear Expression: Output variable acquires the value of the sum of input variables multiplied for a constant value.

Linear
Multiply/Divide: Output variable acquires the vulue of the multiplication/divition of input variables.

Multiply/Divide
Wrap: Output variable is wrapped to keep value between upper and down limits. For example, if the desired IAS is wrapped between 0 and 12 m/s, the output variable will have a value of 12 when the desired IAS is greater than this value, and a value of 0 when it is negative.
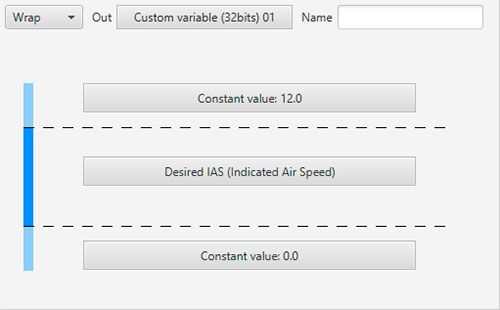
Wrap
Angle Unwrap: When an angle is wrapped in the PIDs, its value is delimited between pi and -pi radians. The operation presented here undoes that calculation by representing the angle in a range starting at 0 radians.

unwrap