Inertial Measurement Unit¶
This device measures and informs about velocity, attitude and forces combining readings of accelerometers and gyroscopes. Veronte needs to receive 7 measurements: accelerometer in 3 axes, gyroscopes in 3 axes and device temperature. In the S-function there are 3 inputs for IMUs. The first one is the main unit and the second one the secondary unit. These units are mounted differently in the autopilot (is not aliganed with autopilot), so user has to keep in mind the rotation matrix which autopilot is using. This matrix is pre-configurated in each PDI and cannot be changed.
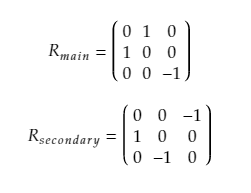
Veronte IMU rotation matrices
There are some ways to implement a suitable group of readings for a IMU. You can create a vector with constant values. Another option could be to store some data (i.e. from a previous flight), load in the matlab workspace, and then send this values to Simulink using the block name as From workspace.
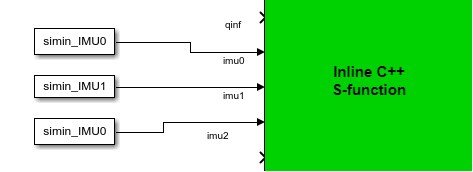
IMU data from workspace
This blocks allows the user to read from an array of values (and interpolate when there are no information in this step). Moreover, user can choose between several options in case data vector is over. For example, it is possible to extrapolate the information or restart the list of values.
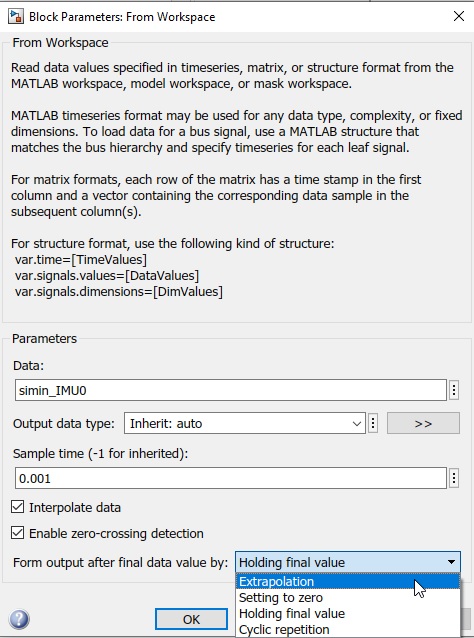
Methods applied when the final data value is reached
Another method is reading this values from Environment (gravity vector in NED, and air temperature), and from states (acceleration in body axes, angular velocity, angurlar acceleration, and the rotation matrix from NED to body). This values are entered to a Matlab function where IMU behaviour is simulated and the measurements are computed). Finally, user have to cross the measurements or apply a rotation matrix according to IMU sensor orientation. In the example below, this data is feeding the first port (in the PDI configuration this IMU is selected). Therefore, user has to cross the signals to fit the rotation matrix.
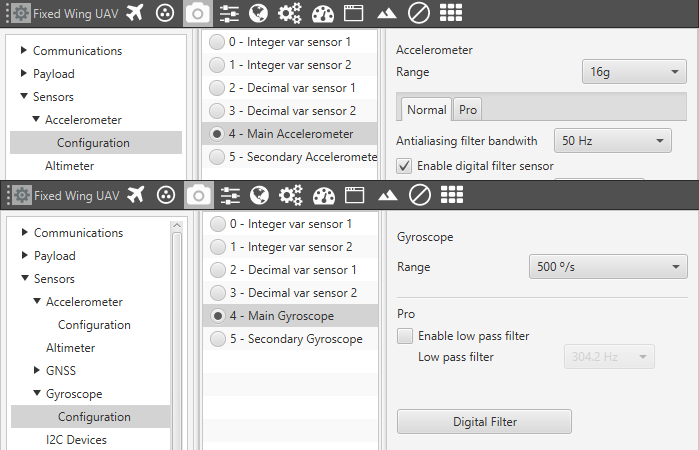
PDI configuration for main IMU
The complete subgroup results as follows:
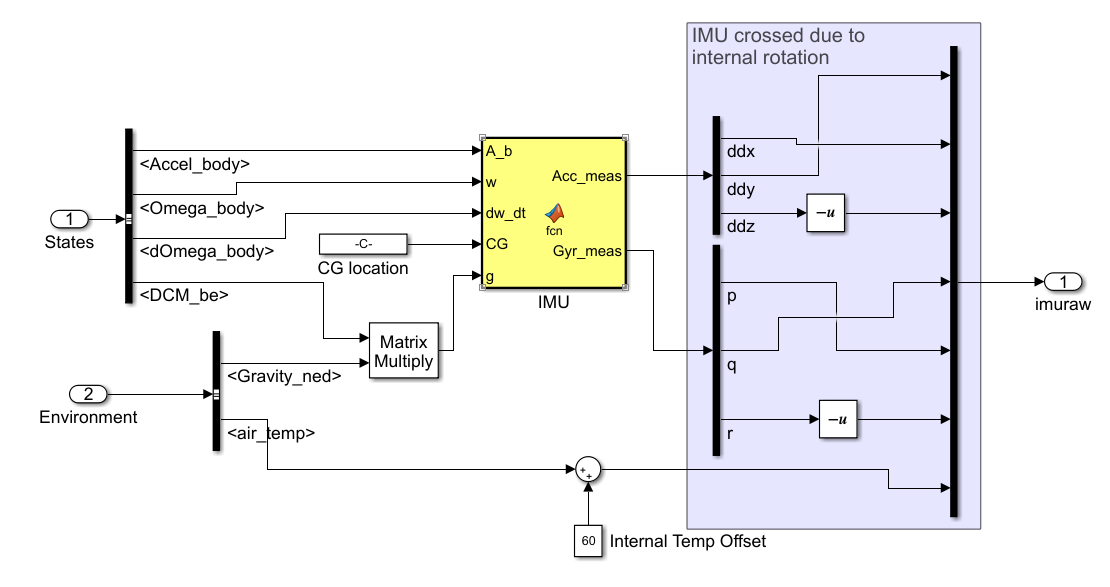
IMU subgroup
Instead of use a user function, Aerospace blockset include some functions for IMU simulation:
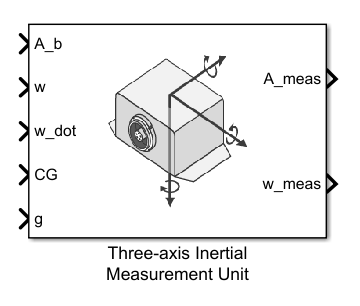
IMU block from Aerospace Toolbox