Quick Commands¶
Quick commands are common actions that are performed during a standard operation and are alredy predefined. This way, there is no need of modifying the configuration or building a specific Automation.
Note
Some of the following quick commands can also be triggered automatically using Automations.
Panel Quick Commands
These actions can be accessed from the specific drop-down list located on the Veronte Panel.
Calibrate IMU:
Correct any biases on the IMU calibration, including mounting offsets.
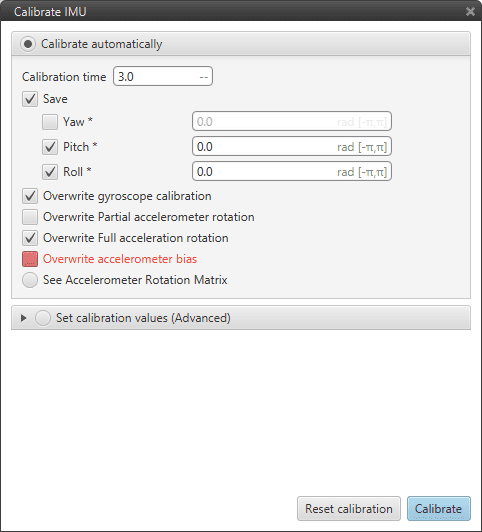
IMU Calibration
There are three calibration options available in the automatic calibration:
Overwrite Partial accelerometer rotation: only calibrates pitch and roll angles. The autopilot must be horizontal during the calibration process:
IMU Partial accelerometer rotation
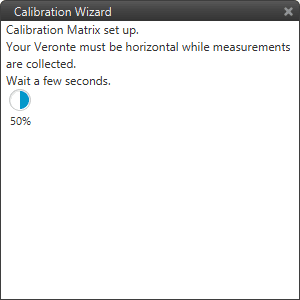
Overwrite Full accelerometer rotation: calibrates pitch, roll and yaw angles and it needs to take measurements in two orientations. During the first measurement the autopilot must be horizontal:
IMU Full accelerometer rotation first measurement
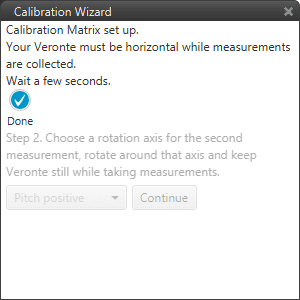
The second measurement requires to rotate the autopilot around the selected axis. The options are: pitch positive, pitch negative, roll positive, roll negative. The autopilot must be turned more than 10 degrees in the selected axis.
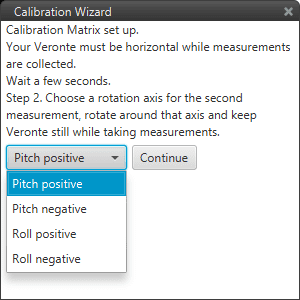
IMU Full accelerometer rotation second measurement
Overwrite accelerometer bias: calibrates the accelerometer bias in each axis. The autopilot must be horizontal during the calibration process.
It is also possible to input calibration values manually if known:
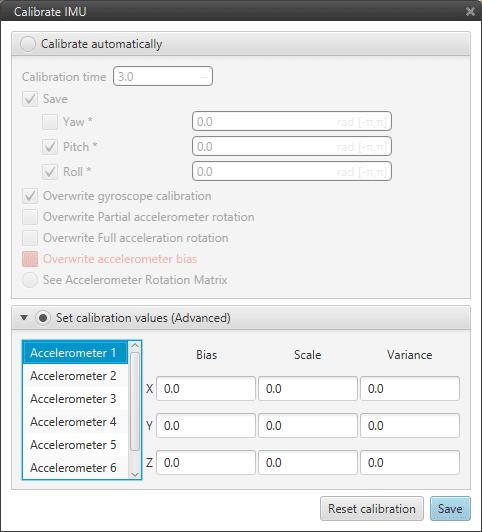
IMU Advanced Calibration
Calibrate Magnetometer:
Perform magnetometer calibration. Both Soft and Hard Iron calibrations are available. Soft Iron calibration will perform Hard Iron calibration also.
Tip
To achieve the best calibration, try to perform the calibration under operational conditions, including nominal currents and other magnetic disturbance sources that may be present during the operation
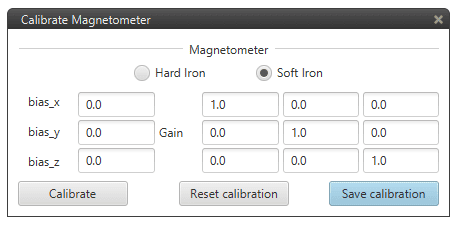
Magnetometer Calibration
Calibrate Static Pressure:
Calibration for the static pressure calculation.
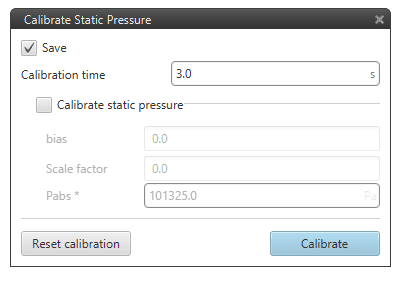
Static Pressure Calibration
Calibrate Dynamic pressure:
Calibration for Airspeed calculation
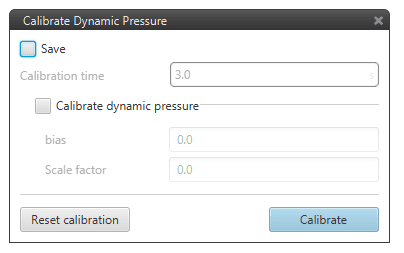
Dynamic Pressure Calibration
Warning
Dynamic pressure calibration is very sensitive to pressure disturbances. Make sure that the pressure intake is not disturbed while performing this calibration.
Calibrate Atmosphere:
Calibration for MSL calculation with barometric pressure. Both QNH and QFE options are available. Static pressure can be selected from the autopilot measurement or it can be written by the user if known.
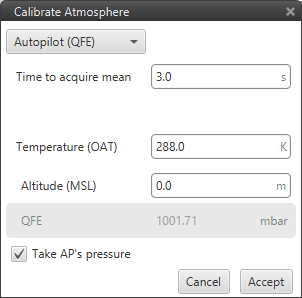
Atmosphere Calibration
Calibrate DEM:
Calibrate any offset that the current terrain model may have for your current position.
Warning
Always perform this action on the ground, unless an accurate estimation of current AGL is available
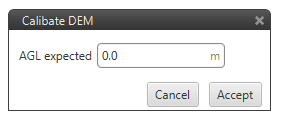
DEM Calibration
Command Position:
Allows to manually modify the Position Navigation state.
Warning
If there is any absolute positioning sensor active (i.e. GNSS), this command will not work since it will be automatically overrided.
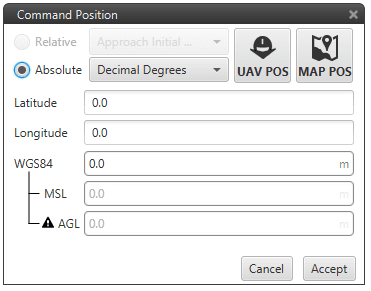
Command Position
Command Yaw:
Allows to manually modify the Yaw Navigation state.
Warning
If there is any Yaw sensor active (i.e. Magnetometer), this command will not work since it will be automatically overrided.
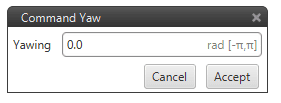
Command Yaw
Enter Wind Information:
Enter initial values for wind state and start wind estimation algorithm.
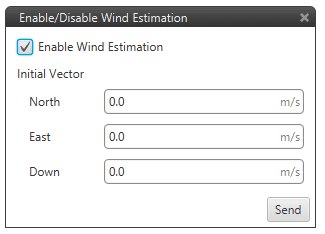
Wind Parameters
Command PID:
Allows to modify PID gains during operation.
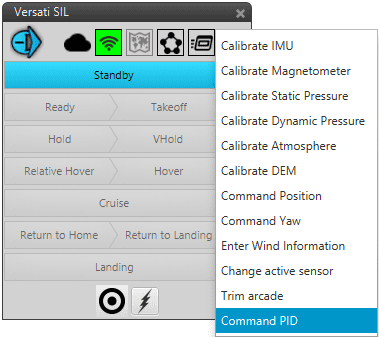
PID Command
Click on Command PID, a new window will show up. Then select a valid PID block from the tree (they are shown in green). This tree represents how control blocks are organised in Programs.
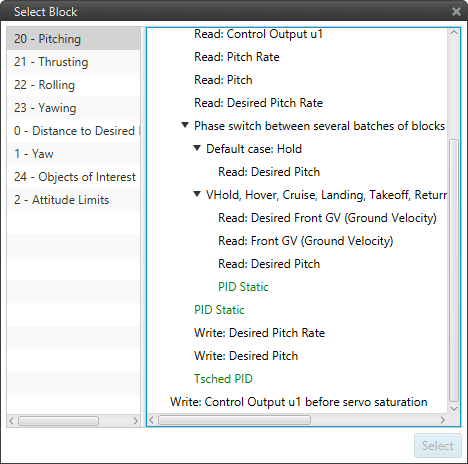
Select PID
Behind this window there is another where users can modify the values of PID gains and type (standard or parallel). Here, users can either increase or decrease each of the gains P/I/D or N(derivative filter)/Imax. Modifying and clicking on send, updates the values of your vehicle. Clicking on Change block returns to the previous menu where you have to select again a new ‘green’ block.
Warning
All changes applied are volatile and will be lost after the system is reset. After the desired values are found, the save button must be clicked but restart is required.
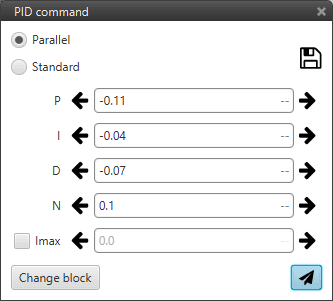
PID parameters
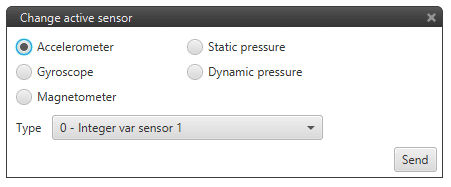
Change Active Sensor:
Allows to change one of the currently selected sensors.
Warning
Remeber that these changes are volatile. After the system is restarted, the selected sensor set will be the one defined on the configuration
Calibrate IMU
Trim Arcade:
Calibrate current stick for arcade commands
Trim Arcade
Detour Quick Commands:
The following commands are only accessible if the current phase has an active Cruise Guidance. They allow to make temporary changes to the execution of the current mission.
Fly to Hover:
Create a volatile waypoint and change the current route. The created reference will dissappear whenever this command is overrided.
Fly to Hover
Fly to Loiter:
Create a volatile loiter and change the current route. The created reference will dissappear whenever this command is overrided.
Fly to Loiter
Fly to Waypoint:
Fly to an existing Waypoint. If the Waypint belongs to a mission, the UAV will continue that mission after thewaypoint is reached.
Fly to Waypoint