Others¶
Stick Auto¶
This automation changes the control mode according to the command sent by the radio controller.
.png)
Stick Auto automation
In this case, the channel that controls the mode is the 8, so according to its value the mode is changed. With an event of type Variable the automation is defined. The process is the same for the manual mode, but when the r8 variable has a value lower than 0.25.
Video Tutorial: https://www.youtube.com/watch?v=C3A6P1jgFV4&feature=youtu.be
Automatic Landing (Multicopterss)¶
If the user wants the multicopter stops the motors when landed (pass to Standby automatically), it is possible to configure an automation which performs this action.
Normally, to control the automatic landing, the following variables are used:
Ground Speed Down
AGL (Above ground level altitude)
Thrust control
Landing current phase
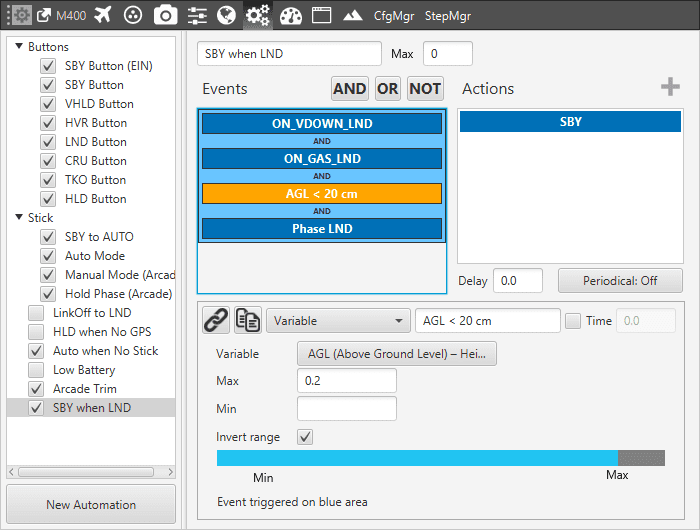
Landing auto configuration
Variable values must be chosen depending on multicopter (rotor number, dimensions, altitude sensors, etc…) and an integral control increase can be taken into account in order to perform a faster RPM descending and a better landing.