Payload¶
This panel allows users to configure the gimbal settings, including the number of gimbal axis, servos used for gimbal connection and distance from the autopilot to the Gimbal.
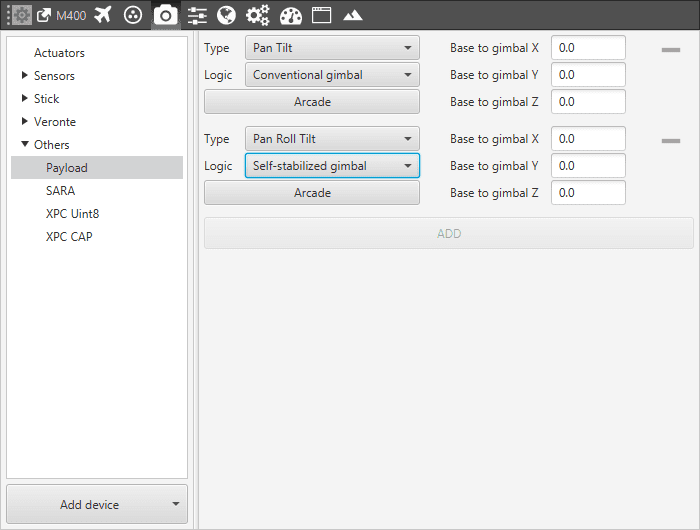
Payload Configuration Menu
Type: user can install a Pan -Tilt, Roll-Tilt or Pan-Roll-Tilt Gimbal, depending on the degrees of freedom of the Gimbal Device.
Logic: Conventional gimbal or Self-stabilized gimbal.
Base to gimbal X, Y, Z: relative position between the Gimbal and Veronte.
It is possible to configure two gimbals at the same time, press ADD to incorporate one into the Panel.
Payload Operation¶
In order to configure a complete Payload Operation, the following steps have to be done. All steps are based on a Conventional Gimbal with two axes of rotation (Pan and Tilt).
Configure the US matrix selecting the control outputs (U) and actuator outputs (S). This has to be done according to the Gimbal used.
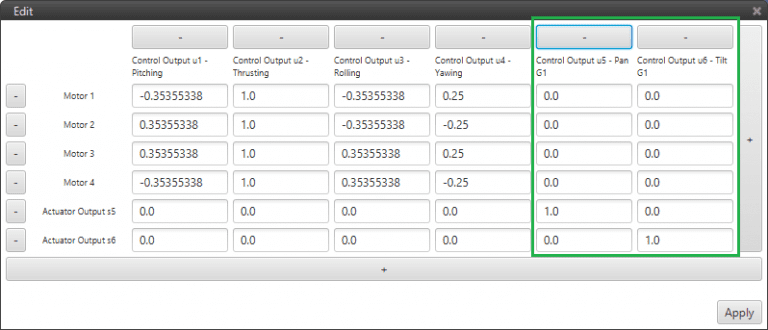
SU Matrix
Configure the relationship between PWM signals and actuator outputs (S), it depends on the device used, prior to configure this check performances. It may requiere to add PWM Outputs, in its correspondent panel, Connections.
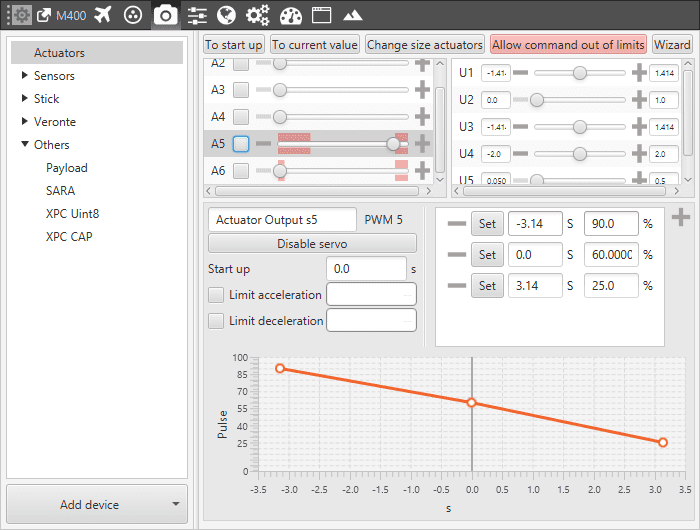
SU Matrix
Configure the Payload Device.
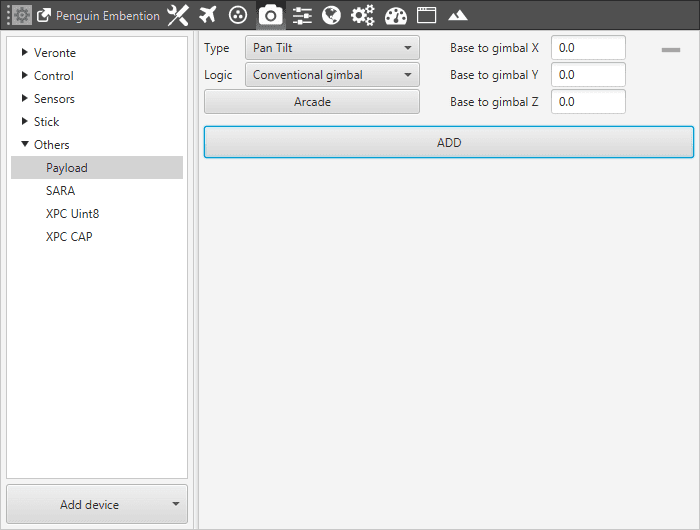
Payload Configuration
Next step is the configuration of the control loops for each axe: Pan and Tilt. Control loops can be either close loop or open loop. It depends on if there is any variable available for feedback.
Pan control: select Joint 1 of gimbal 1 as entry variable (desired Pan angle) and if exists a feedback variable select it, otherwise select the variable Zero, this sets a open loop.
Tilt control: select Joint 2 of gimbal 1 as entry variable (desired Tilt angle) and if exists a feedback variable select it, otherwise select the variable Zero, this sets a open loop.
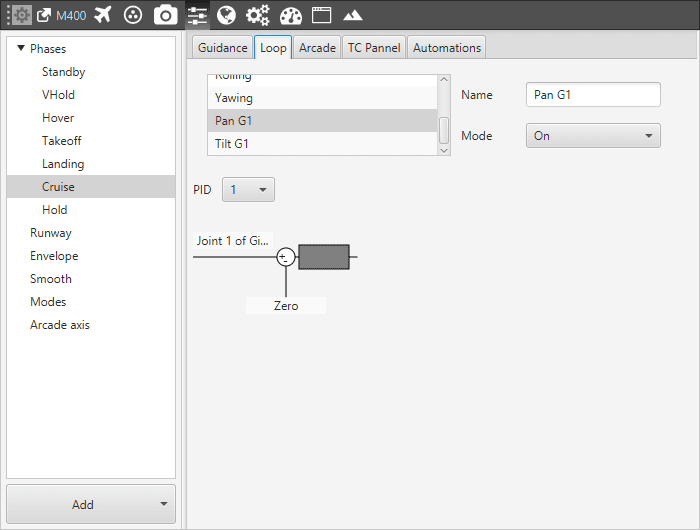
Control Loop
A typical setting for the control loop incorpores: a proportional and integral gain.
The last step consists in configuring the widget that displays all the information related to the gimbal. Generally, this devices incorpores a Camera being possible to stream the signal in this widget. To configure this widget go to the Workspace Panel and add the widget of Gimbal. In this panel is possible to select a Gimbal and Camera if there is any device available.
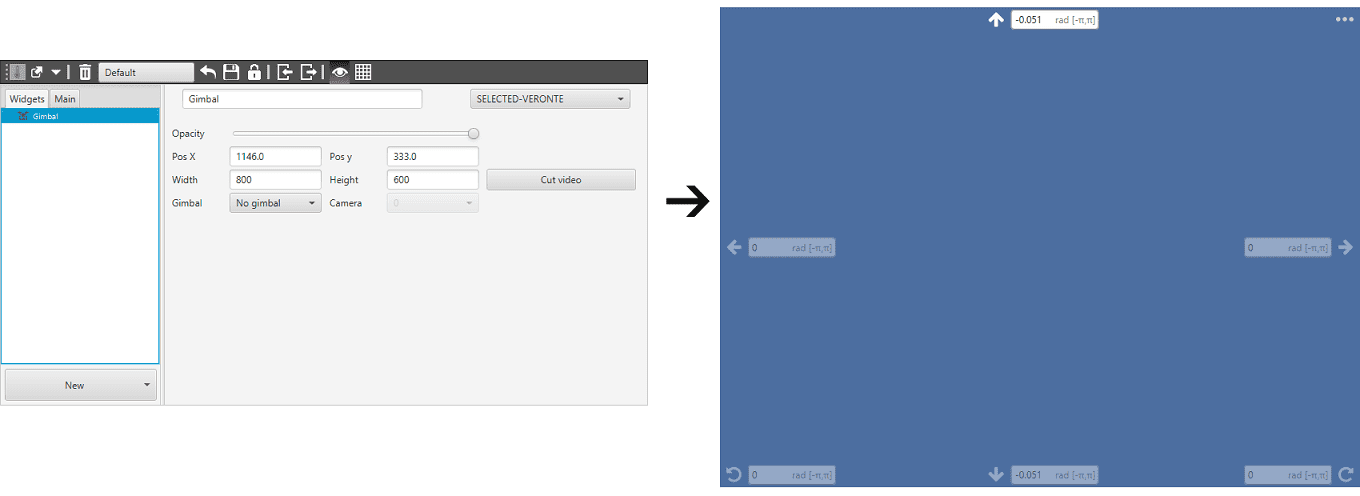
Widget Configuration
When configuring this widget the window above will be shown, this allows the user to control the gimbal. The movements are controlled with the arrows shown on the window, the user can press on them to move the gimbal or introduce a value.