CAN Telemetry¶
Interactions between system variables and CAN variables are managed from the telemetry configuration. In this section the following elements can be configured:
TX Ini: used to configure transmitted messages that are only sent once at the beginning of the operation
TX: used to configure transmitted messages through CAN bus.
RX: used to configure the interaction between the variables read from the CAN bus and the variables of the system i.e, how they are stored.
CAN – Telemetry
TX Messages¶
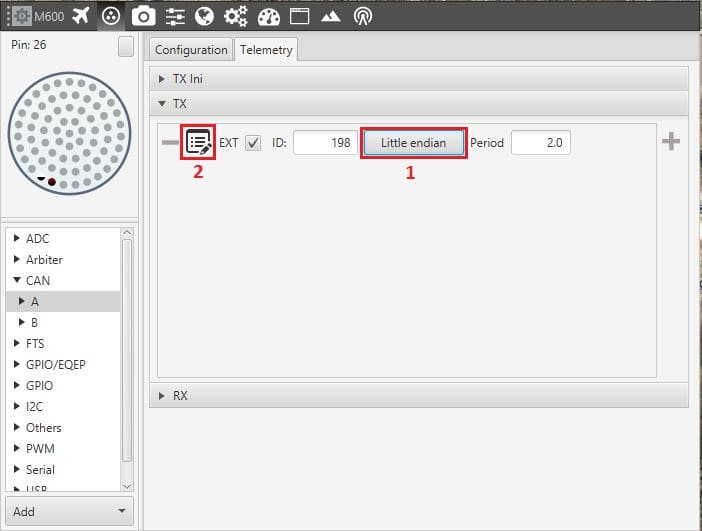
CAN – Telemetry - TX
In order to add a message to be sent press “+” and a new element will be added into the panel.
EXT: enables the frame format with 29 identifier bits.
ID: identifier 11 or 29-bits (Extended), used to identify TX messages. The value set has to be decimal as it was written on Configuration.
Period: time in seconds between TX messages delivery.
Button 1: open a new window to configure the endianness of the message, which indicates how the bytes that it contains are written:
Big endian: set the value from left to right
Little endian: set the value from right to left
Mixed endian: Any devices have this format. If you need to configure, please contact us.
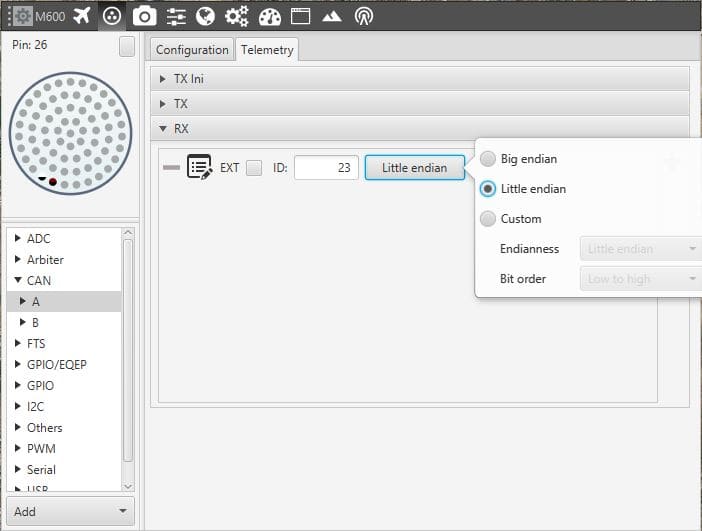
CAN – Telemetry – RX Endianess
Button 2: displays the menu to configure how the bits of the message are divided and sent.
There are six different elements that can be added when setting up a CAN message: Variable, Checksum, Matcher, Skip, Parce Ascii and Position.
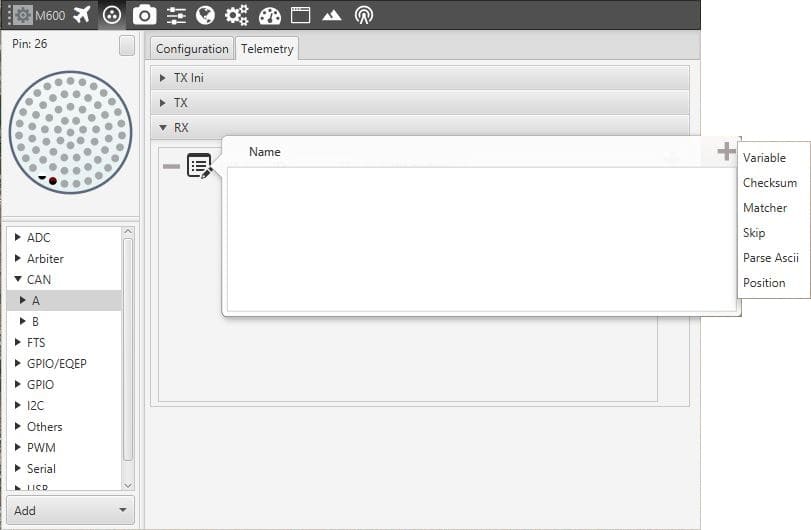
CAN – Telemetry – RX Message Confguration
RX Messages¶
Once a message is “captured” by Pipe (tab Configuration) and stored in the mailbox, its information can be read and saved in the software. To perform that, press “+” to create a new message and follow the steps explained for TX Messages, except by Period which is exclusive for TX.