Cruise¶
This phase is used to make the aircraft follow a position-based route created by the user in the Mission menu. This is the principal use of this guidance algorithm, but it can also be used to make the aircraft go to a certain location (e.g waypoint) without indicating the full route, thus being a guidance used to command a movement by position. All the parameters that define the cruise guidance are detailed.
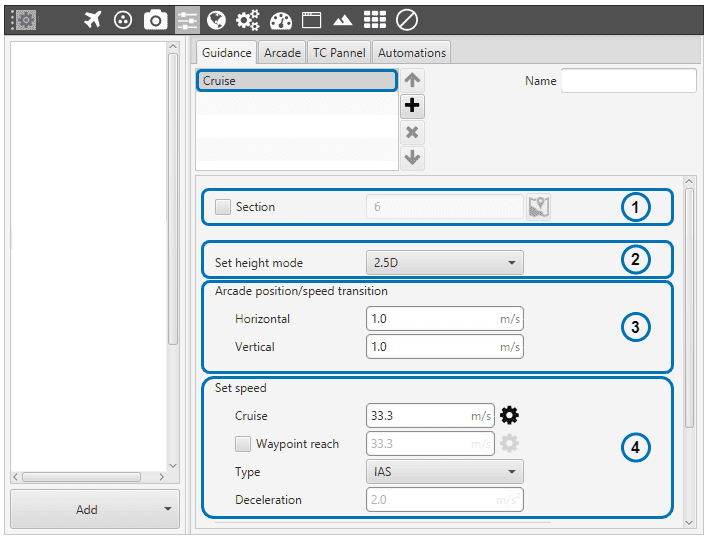
Cruise Guidance Menu (I)
Section. This option allows the user to select the first path to be flown to. The user should first enable this option, click on
 and then click on the desired waypoint to bo the first-of-the-route.
and then click on the desired waypoint to bo the first-of-the-route.Set height mode. Height mode indicates how the aircraft will perform the route whein it comes to the waypoints’ altitude. There are three possible height modes:
2D mode: if this mode it is selected, the platform will follow the predifined route without taking into account the altitude of the waypoints, it will keep the altitude that it has at the moment it enters in the cruise guidance.
2.5D mode: the vehicle will follow a 3D trajectory that connects both waypoints. However, it will give priority to horizontal guidance. Veronte will try to adjust its position and altitude to the path (both horizontally and vertically), but if for any reason it cannot reach the altitude of the final waypoint, it will considered that it has been reached if its position matches the position of the waypoint.
3D mode: the vehicle will follow a 3D trajectory that connects both waypoints. In this case, horizontal and vertical guidance have the same priority level. This means that Veronte will not consider that a waypoint has been reached until its position and altitude match the waypoint’s ones. As this type of guidance may result in a vertical flight, it is reserved for multicopters or hybrid platforms.
Arcade position/speed transition In Arcade mode the trajectory generated (position) is not followed and instead the aircraft moves according to the commanded speed. The horizontal and vertical speed parameters serve as the upper-thresholds for when the aircraft’s guidance should be position-based, even in Arcade mode. This parameters are mainly useful for platforms like multicopters.
- Set speed: this option sets the desired aircraft speed during the manoeuvre.
Cruise: sets the velocity modulus of the commanded velocity.
Waypoint reach indicates the speed at which the platform will reach the waypoints of the path, i.e. it will travel along the path with the speed indicated in the option Cruise and then it will decelerate or accelerate to the speed indicated in here.
Defined speed type can be IAS (indicated airspeed) or Ground speed. Normally, IAS is used for airplanes and Ground speed for multicopters.
Deceleration: maximum allowed acceleration/deceleration to meet the desired velocity.
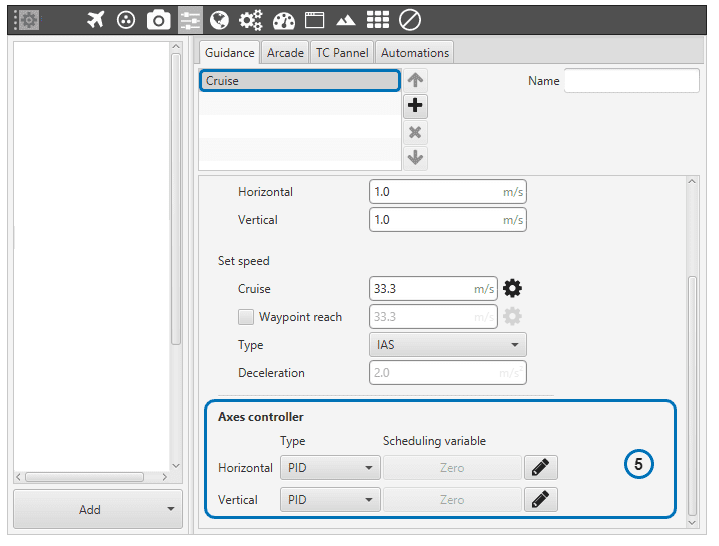
Cruise Guidance Menu (II)
Guidance control: a horizontal and vertical position PID controller is defined here. Its purpose is to adjust the platform’s actual trajectory to the desired one. When clicking on Horizontal or Vertical, a pop-up window will open where the control gains should be introduced – for more information on the latter subject check the Blocks. In the horizontal-position PID (see image below), North-East current position of the aircraft is compared to the desired position. The output of the PID controller is going to be a ground speed in the North-East plane, which translates into a desired lateral and front ground speeds in body axes. The same logic applies for the vertical-position PID.
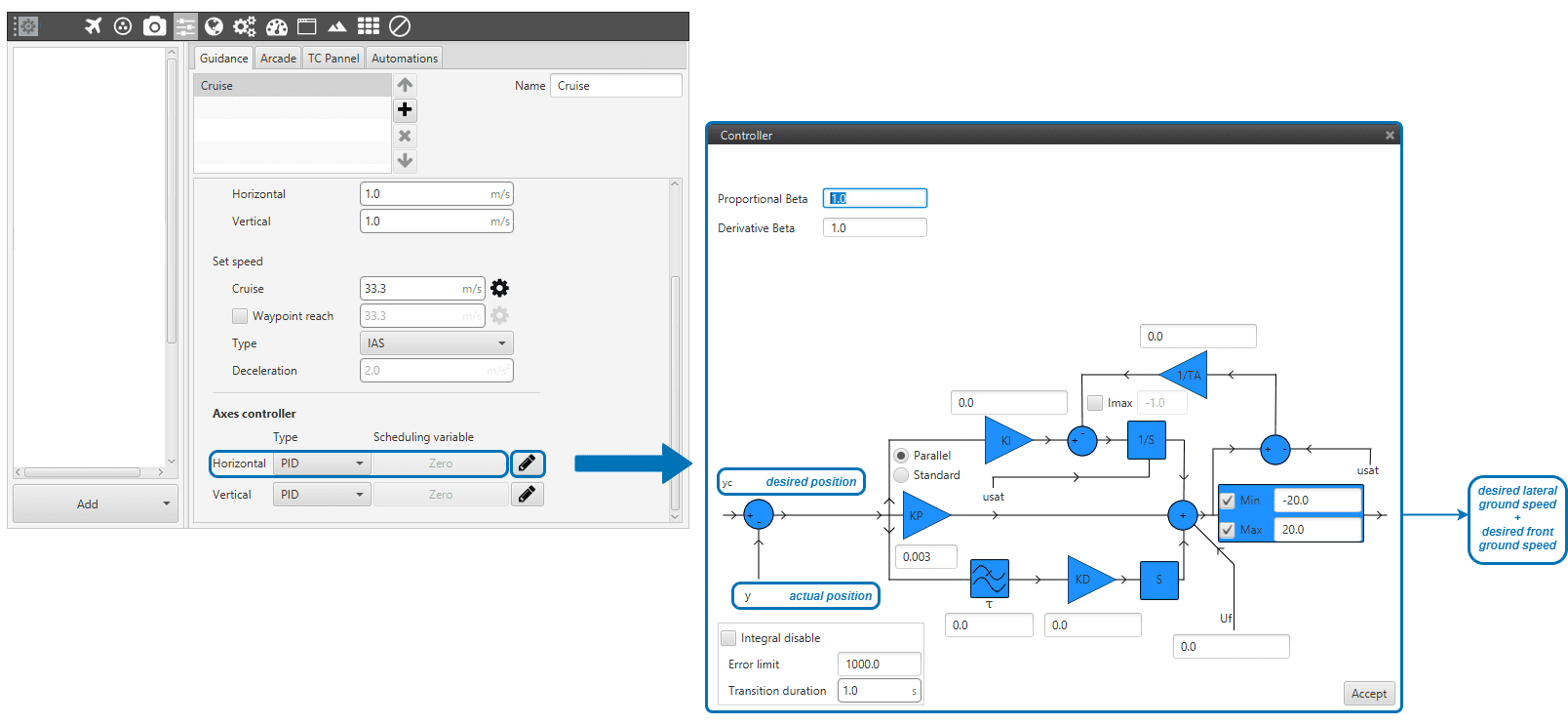
Horizontal Position PID
Guidance-generated Variables¶
Cruise guidance generates a three-dimensional trajectory, as well as a set of variables which can be used in the control loops.
The list of variables is the following:
Desired position.
Track position.
Track state (current patch, last patch).
Desired latitude, desired longitude, desired WGS84, desired MSL, desired AGL.
Desired velocity.
Desired front groundspeed, desired lateral groundspeed, desired velocity down.
Desired tangential acceleration.
Desired IAS.
Guidance north error.
Guidance east error.
Guidance down error.
Desired body velocities.
Desired velocities north, east, down.
Desired heading, FPA and bank.
Route-guidance distance - tangential component.
Route-guidance distance - horizontal component.
Route-guidance distance - perpendicular component.