Electrical¶
Power¶
Veronte can use unregulated DC (6.5V to 36V). Pins used for power and ground are the same for both Ground and Air configurations.
LiPo batteries between 2S and 8S can be used without regulation needs. Remaining battery level can be controlled by the internal voltage sensor and by configuring the voltage warnings on the Pipe software.
For higher voltage installations, voltage regulators must be used. For dimensioning voltage regulators take into account that a blocked servo can activate regulator thermal protection.
Warning
Caution!! Power Veronte out of the given range can cause irreversible damage to the system. Please read carefully the manual before powering the system.
Veronte and servos can be powered by the same or different batteries. In case of having more than one battery on the system, a single point ground union is needed to ensure a good performance. The ground signal should be isolated from other noisy ground references (e.g. engines). If all grounds need to be connected, the connection should be made on the negative pole of the battery.
It is recommendable to use independent switches for autopilot and motor/actuators. During the system initialization, the PWM signal will be set to low level (0V), please make sure that actuators/motor connected support this behaviour before installing a single switch for the whole system.
Veronte I/O Signals¶
68 pin connector for Veronte Autopilot (frontal view)
Pin |
Signal |
Type |
Comments |
|---|---|---|---|
1 |
I/O1 |
I/O |
PWM/DIGITAL output /DIGITAL input signal (0-3.3V) |
2 |
I/O2 |
I/O |
PWM/DIGITAL output /DIGITAL input signal (0-3.3V) |
3 |
I/O3 |
I/O |
PWM/DIGITAL output /DIGITAL input signal (0-3.3V) |
4 |
I/O4 |
I/O |
PWM/DIGITAL output /DIGITAL input signal (0-3.3V) |
5 |
I/O5 |
I/O |
PWM/DIGITAL output /DIGITAL input signal (0-3.3V) |
6 |
I/O6 |
I/O |
PWM/DIGITAL output /DIGITAL input signal (0-3.3V) |
7 |
I/O7 |
I/O |
PWM/DIGITAL output /DIGITAL input signal (0-3.3V) |
8 |
I/O8 |
I/O |
PWM/DIGITAL output /DIGITAL input signal (0-3.3V) |
9 |
GND |
GROUND |
Ground signal for actuators 1-8 |
10 |
I/O9 |
I/O |
PWM/DIGITAL output /DIGITAL input signal (0-3.3V) |
11 |
I/O10 |
I/O |
PWM/DIGITAL output /DIGITAL input signal (0-3.3V) |
12 |
I/O11 |
I/O |
PWM/DIGITAL output /DIGITAL input signal (0-3.3V) |
13 |
I/O12 |
I/O |
PWM/DIGITAL output /DIGITAL input signal (0-3.3V) |
14 |
I/O13 |
I/O |
PWM/DIGITAL output /DIGITAL input signal (0-3.3V) |
15 |
I/O14 |
I/O |
PWM/DIGITAL output /DIGITAL input signal (0-3.3V) |
16 |
I/O15 |
I/O |
PWM/DIGITAL output /DIGITAL input signal (0-3.3V) |
17 |
I/O16 |
I/O |
PWM/DIGITAL output /DIGITAL input signal (0-3.3V) |
18 |
GND |
GROUND |
Ground signal for actuators 9-16 |
19 |
RS 232 TX |
Output |
RS 232 Output |
20 |
RS 232 RX |
Input |
RS 232 Input |
21 |
GND |
GROUND |
Ground signal for buses |
22 |
Analog 4 |
Input Analog |
Input 0-3V |
23 |
Analog 5 |
Input Analog |
Input 0-3V |
24 |
GND |
GROUND |
Ground signal for buses |
25 |
CanA P |
I/O |
CANbus interface. It supports data rates up to 1 Mbps |
26 |
CanA N |
I/O |
Twisted pair with a 120 Ω Zo recommended |
27 |
GND |
GROUND |
Ground signal for buses |
28 |
CANB_P |
I/O |
CANbus interface. It supports data rates up to 1 Mbps |
29 |
CANB_N |
I/O |
Twisted pair with a 120 Ω Zo recommended |
30 |
GND |
GROUND |
Ground signal for buses |
31 |
I2C_CLK |
Output |
Clk line for I2C bus |
32 |
I2C_DATA |
I/O |
Data line for I2C bus |
33 |
GND |
GROUND |
Ground for 3.3 V power supply |
34 |
3.3V |
POWER |
3.3 V-100 mA power supply |
35 |
GND |
GROUND |
Ground for 5 V power supply |
36 |
5V |
POWER |
5 V – 100 mA power supply |
37 |
GND |
GROUND |
Ground for analog signals |
38 |
ANALOG_1 |
Input |
Analog input 0-3 V |
39 |
ANALOG_2 |
Input |
Analog input 0-3 V |
40 |
ANALOG_3 |
Input |
Analog input 0-3 V |
41 |
GND |
GROUND |
Ground for FTS signals |
42 |
FTS_OUT |
Output |
Deadman (i.e. Heart-Beat, Alive…) signal from comicro, monitors main MPU encoding its product-level bit. Deadman signal is a Square Wave at [100,125] Hz. It can be higher at rebooting (about 300-400Hz) but should never be less than 100 Hz. |
43 |
FTS2_OUT |
Output |
Output is a !SystemOK (0 when Ok, VCC when in Error) Bit Low (0 volts) if no failure detected. High (3.3 volts) on error detected. This pin goes high if the deadman signal sent by the MPU (main processor unit) is lower than 63Hz. That means there is a critical error |
44 |
GND |
GROUND |
Ground signal for safety buses |
45 |
V_ARB_TX |
Output |
Veronte comicro UART output to activate safety mechanism |
46 |
V_ARB_RX |
Input |
Veronte comicro UART output to activate safety mechanism |
47 |
GND |
GROUND |
Ground signal comicro power supply |
48 |
V_ARB_VCC |
POWER |
Veronte comicro power (6.5 to 36 V) |
49 |
FTS3_OUT_MPU |
Output |
MPU alive voting signal, to use with 4xVeronte. It is a Square Wave at [100,125] Hz |
50 |
OUT_RS485_P |
Output |
Non-inverted output from RS485 bus |
51 |
OUT_RS485_N |
Output |
Inverted output from RS485 bus |
52 |
IN_RS845_N |
Input |
Inverted input from RS485 bus |
53 |
IN_RS845_P |
Input |
Non-inverted output from RS485 bus |
54 |
RS-485_GND |
GND |
Ground for RS-485 bus |
55 |
EQEP_A |
Input |
Encoder quadrature input A (0-3.3 V) |
56 |
EQEP_B |
Input |
Encoder quadrature input B (0-3.3 V) |
57 |
EQEP_S |
Input |
Encoder strobe input (0-3.3 V) |
58 |
EQEP_I |
Input |
Encoder index input A (0-3.3 V) |
59 |
GND |
GROUND |
Ground for encoders |
60 |
V_USB_DP |
I/O |
Veronte USB data line |
61 |
V_USB_DN |
I/O |
Veronte USB data line |
62 |
V_USB_ID |
I/O |
Veronte USB ID line |
63 |
FTS_OUT_MPU |
Output |
Abort mission voting signal from MPU, to use with 4xVeronte. Bit Low (0 volts) if mission OK. High (3.3 volts) if mission wants to be terminated. |
64 |
FTS2_OUT_MPU |
Output |
Abort mission voting signal 2 from MPU, to use with 4xVeronte. Bit Low (0 volts) if mission OK. High (3.3 volts) if mission wants to be terminated. |
65 |
GND |
GROUND |
Veronte ground input |
66 |
ND |
GROUND |
Veronte ground input |
67 |
VCC |
POWER |
Veronte power supply (6.5 to 36 V) |
68 |
VCC |
POWER |
Veronte power supply (6.5 to 36 V) |
Flight Termination System (FTS)¶
In order to use the FTS of Veronte the user has to analyze Pins 42 and 43 (FTS ones). With pin 43 it can be studied with a !SystemOK bit if the system is working properly or not. Check below the information provided by each pin:
Pin 42: Deadman signal (i.e. Heart-Beat, Alive…) encoding its product-level bit. Deadman signal is a Square Wave at [100,125] Hz. It can be higher at rebooting (about 300-400Hz) but should never be less than 100 Hz.
Pin 43: Outputs a !SystemOK (0 when Ok, VCC when in Error) Bit. Low (0 volts) if no failure detected. High (3.3 volts) on error detected. This pin goes high if the deadman signal sent by the MPU (main processor unit) is lower than 63Hz. That means there is a critical error.
Joystick¶
To use the joystick in the system, connect the PPMout of the trainer port to a digital input of Veronte and configure that digital input as the radio input in Pipe.
If the PPM level is 3.3V, pins 1-8, 10-17 and 55-58 pins can be used.
Veronte is compatible with standard Pulse Positon Modulation (PPM) signals, Futaba radios between 8 and 12 channels are recommended.

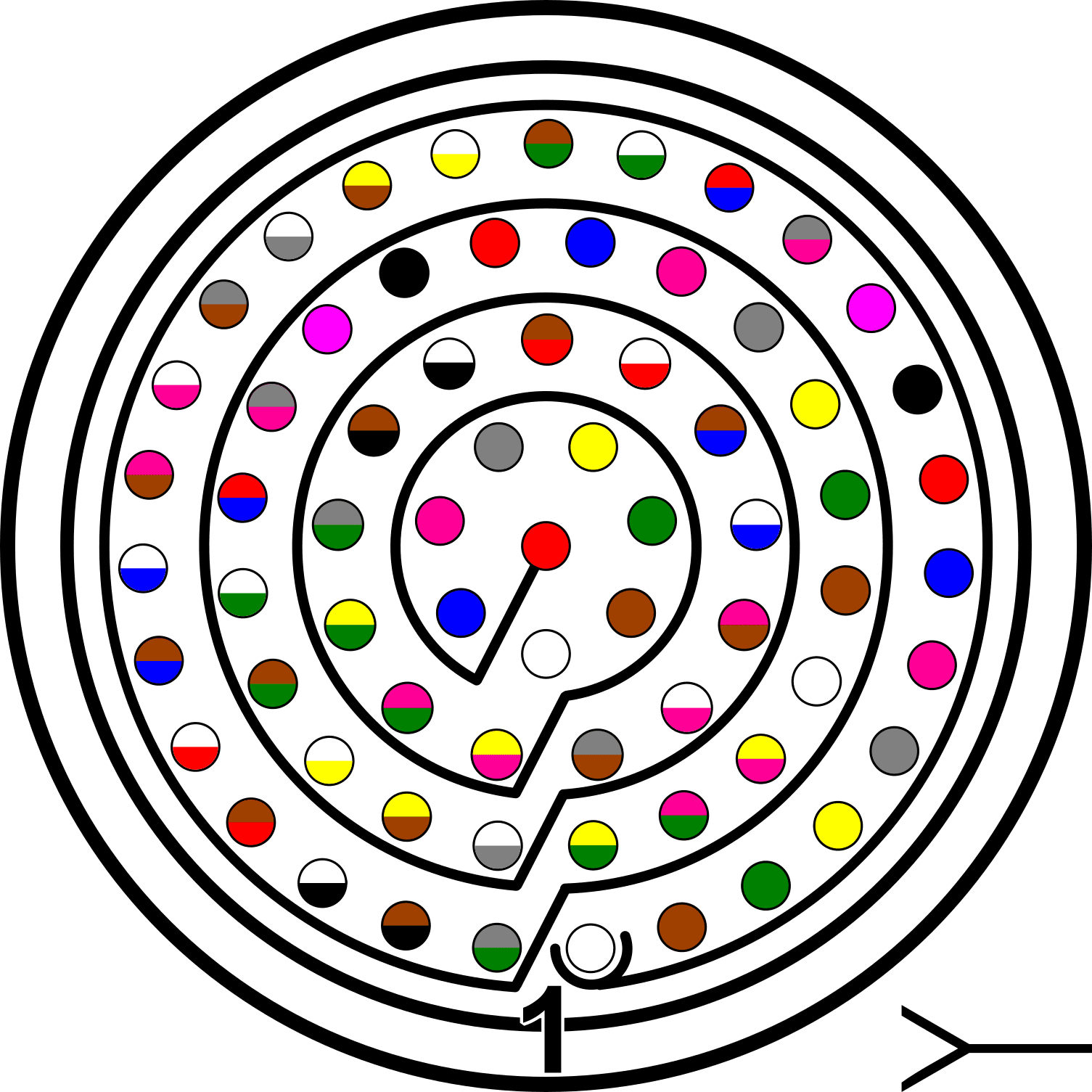
Futaba T10 Joystick
Futaba T10 pinout
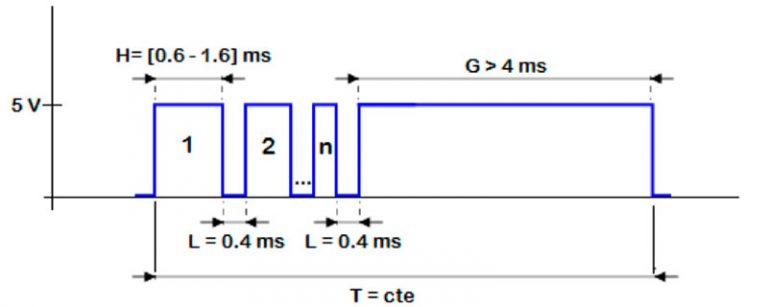
PPM signal
As default, channel 8 is reserved for manual / auto switch. High level is used for automatic flight and low level for manual control. This channel can be configured on Veronte Pipe.
Warning
Caution!! PPM signal must be into the Veronte voltage ranges. Some joysticks may need an adaptation board, please ask our team to check compatibility.
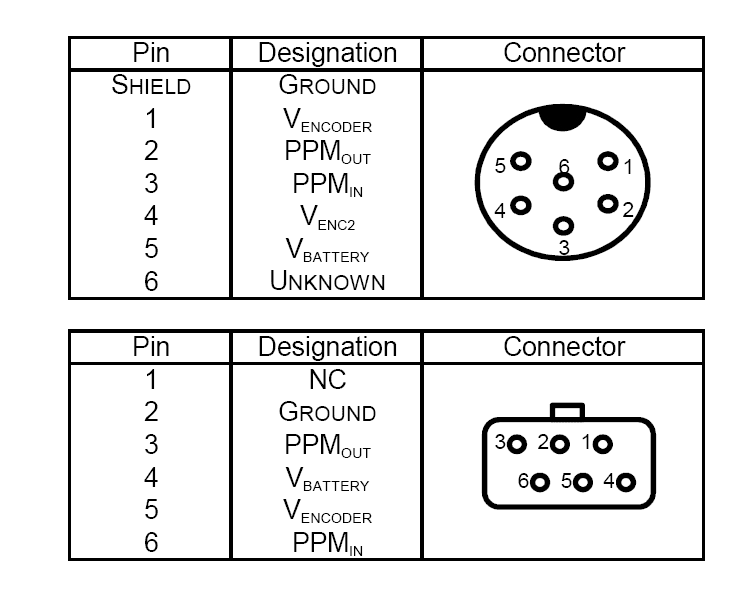
Veronte connector for CS is provided with 3.5mm stereo plug connector as follows:
PPM pinout
PPM connector