Veronte products¶
Connection with Autopilot 1x via CAN¶
No configuration is necessary for MEX, the configuration for communication with Autopilot 1x is set by default.
The configuration required in 1x PDI Builder to communicate with MEX via CAN is explained in the CEX/MEX - Integration examples section of the 1x PDI Builder user manual.
Connection with Autopilot 4x via CAN¶
CAN Reception IDs¶
First of all, users can setup the receiving CAN Ids for each one of the three possible Veronte Autopilots 1x sending data to MEX in the Arbitration menu.
Go to Arbitration menu \(\rightarrow\) CAN Setup panel:
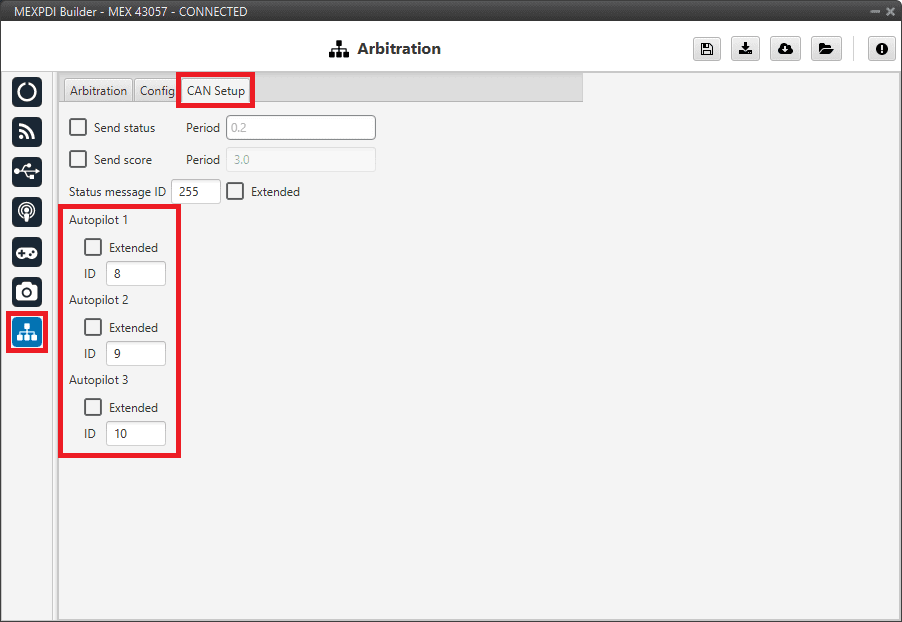
Arbitration - CAN Reception IDs¶
Note
If arbitration is not enabled, and therefore only an Autopilot 1x is being used, no CAN Ids need to be configured here.
CAN I/O Interconnections¶
Once CAN IDs are set, users shall configure:
CAN Input Filters to be used (as communication with MEX has to be always through a Filter).
The connection between input filters and data Consumers.
Go to Input/Output menu \(\rightarrow\) CAN I/O panel \(\rightarrow\) Configuration tab:
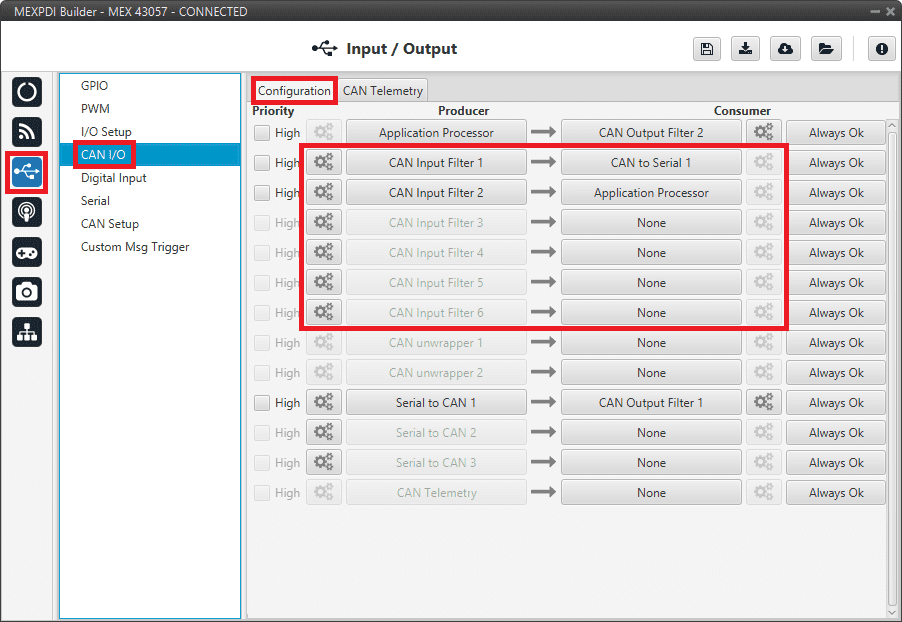
Arbitration - CAN Input Filters¶
For more information on CAN I/O configuration, see the CAN I/O - Input/Output section of the present manual.
Next step is to connect each of the desired data Producers to a CAN Output Filter, and configure both, the Producer and the CAN Output Filter:

Arbitration - CAN Output Filters¶