Quick Start¶
MEX PDI Builder is the main configuration tool to adapt a MEX to a specific vehicle, including user-defined commnication protocols. It includes:
Telemetry: real-time onboard UAV metrics, such as sensors, actuators and control states.
Communications: through General Purpose Inputs and Outputs, PWMs and CAN channels.
Stick control signal management: compatible with Stick Expander, Futaba, Jeti, FrSky and TBS. It includes custom configuration for other sticks.
Arbitration: MEX is able to send PWM signals using arbitration in the same way Veronte Autopilot 4x does.
System Requirements¶
Before executing this software, users should check the following sections with the minimum and recommended PC hardware requirements.
Minimum requirements
CPU: Intel Core i5-8365UE
RAM: 8 GB DDR4
STO: 256 GB SSD
Recommended requirements
CPU: 12th Gen Intel(R) Core(TM) i7-12700H 14 cores up to 4,70 GHz
RAM: 32 GB
STO: 1 TB SSD M.2 NVMe PCIe
Download¶
Once the MEX has been purchased, a GitHub release should be created for the customer with the application.
To access to the release and download the software, read the Releases section of the Joint Collaboration Framework manual.
Installation¶
To install MEX PDI Builder on Windows just execute the “MEXPDIBuilder.exe” file and follow the indications of the Setup Wizard. Administrator rights are needed.
Warning
If users have any problems with the installation, please disable the antivirus and the Windows firewall. Disabling the antivirus depends on the antivirus software.
To disable the firewall, go to “Control Panel” \(\rightarrow\) “System and Security” \(\rightarrow\) “Windows Defender Firewall” and then, click on “Turn windows Defender Firewall on or off”.
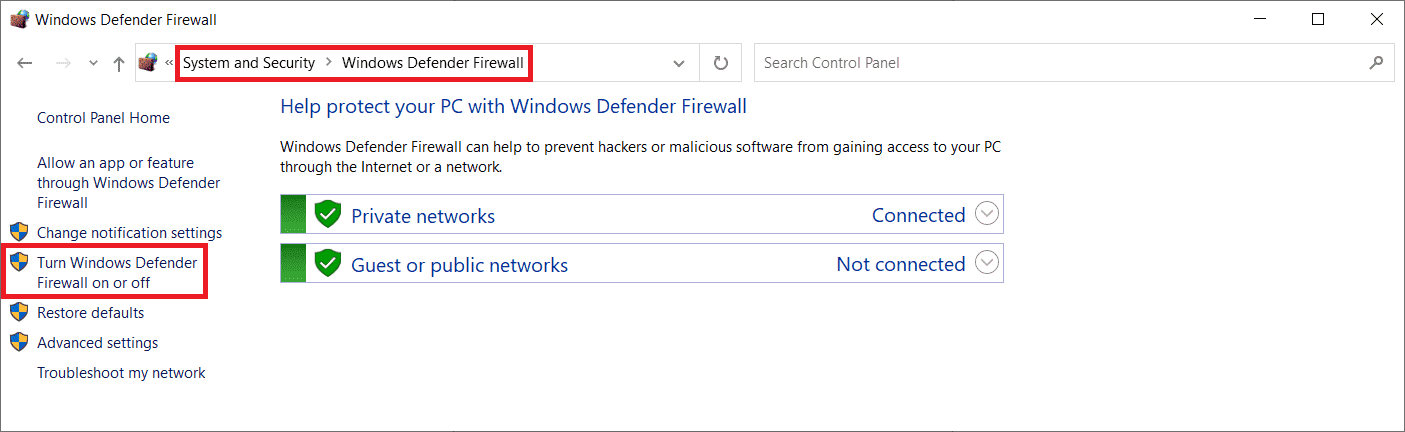
Windows Defender Firewall¶
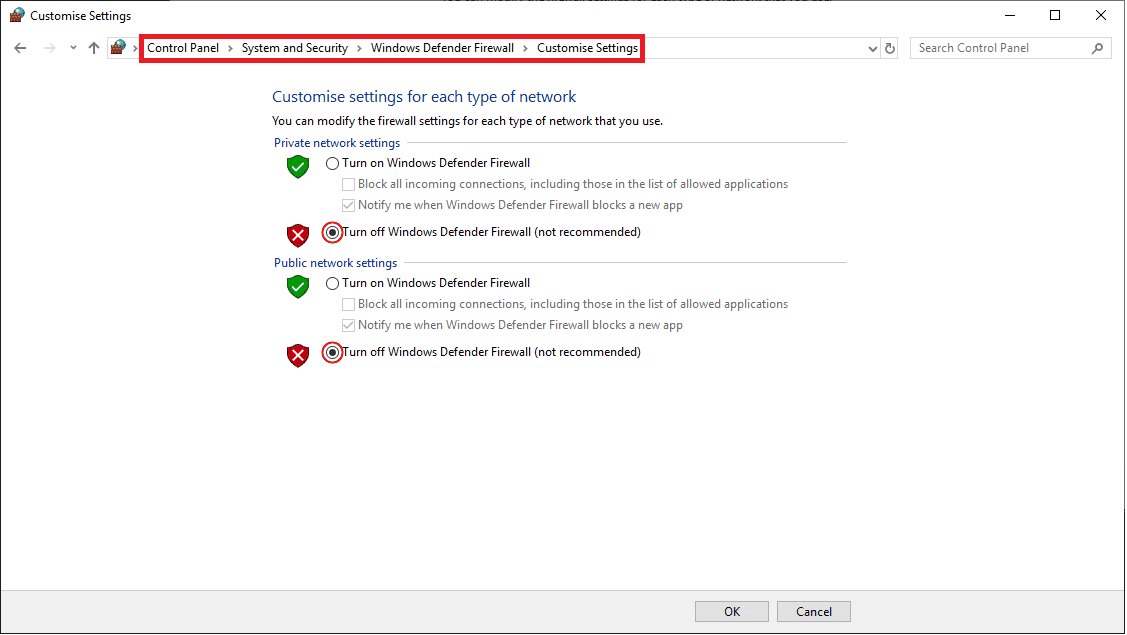
Windows Defender Firewall: Settings¶