 Sensors¶
Sensors¶
RPM¶
MEX can measure RPMs by reading froms up to four input sources:

RPM panel¶
Units: Sensor conversion factor. It can be Custom, Radians per pulse or Pulse per cycle.
Average: Filter to prevent voltage spikes. The readout of the pulse can be filtered as an average output. The amount of measurements to do the average needs to be specified.
Minimum: Here the minimum expected pulse period needs to be specified. This will discard spurius pulses (e.g. induced by EMI) which are smaller than this minimum pulse.
Maximum: The maximum period of time allowed without capturing. If no incoming pulse is received for more than this time, the output RPMs will be 0.
An example about sending RPMs can be found in Reading/Sending RPMs - Integration examples section of the present manual.
Magnetometer¶

Magnetometer panel¶
Magnetometer matrix: This rotation matrix represents the rotation of MEX coordinates with respect to the aircraft body. The behavior of the matrix varies depending on how MEX is used.
If MEX is used independently (without Veronte Autopilot 1x): The rotation matrix should convert MEX coordinates to the Aircraft Body coordinates. That is, the conversion is directly from MEX to the aircraft coordinates.
If MEX is used together with Veronte Autopilot 1x: The rotation matrix should convert MEX coordinates to Veronte Autopilot 1x coordinates, and then Veronte Autopilot 1x will convert the data to the Aircraft Body coordinates; for more information on the rotation matrix of Autopilot 1x, please refer to the Magnetometer - Sensors section of the 1x PDI Builder user manual. Therefore, the coordinate transformation sequence is: MEX \(\rightarrow\) 1xVeronte \(\rightarrow\) Aircraft Body.
Error
The rotation matrix cannot be a zero matrix and must respect the orthogonality of the axes. Not complying with this requirement means an invalid rotation and, consequently, the calibration of this magnetometer will not be possible.
The axis of MEX are physically drawn on the device. The coordinates axis of the aircraft are like other Veronte products, which are defined by the Standard Aeronautical Convention.
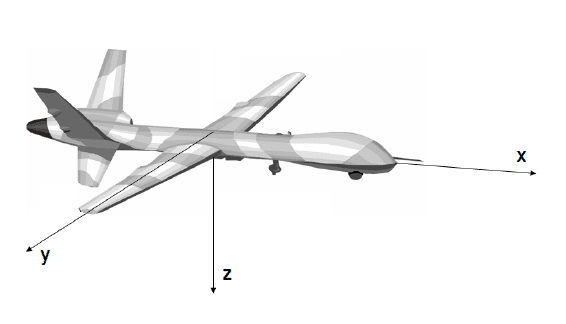
Aircraft coordinates (Standard Aeronautical Convention)¶
Sensor filter: The magnetometer measurements may vary with high frequencies and be difficult to read.
To solve this problem, MEX has this second order low-pass filter to mitigate high frequency variations. It is a software filter. This filter can be enabled clicking on this checkbox.
Cutoff frequency: Sensor filter cutoff frequency is manually configured, allowing the user to enter any desired value in Hz. Frequency variations higher than this value will be filtered out (if the filter is enabled).