Quick Start¶
This user manual covers the mechanical and electric assembly.
The software user manual explains how to configure and use the BCS.
A Veronte-based FCS contains the following elements:
A Veronte Autopilot 1x installed in a vehicle to control. This autopilot executes GNC algorithms in real time in order to accomplish the planned mission and handle the payload.
Veronte Ops - Software dedicated to mission planning, configuration and operation. It allows the user to monitor connected UAS in real time, to interact with them and to replay previous missions for post-flight analysis.
A BCS or PCS linked between Veronte Ops and Veronte Autopilot 1x. They support manual and arcade modes with conventional joysticks.
Warnings¶
This user manual includes references to manuals for software applications. Select your software version to read them.
Power out of range can cause irreversible damage to the system. Please read carefully the manual before powering the system.
Each I/O pin withstands a maximum current of 1.65 mA. See pinout for more information.
Basic connection for operation¶
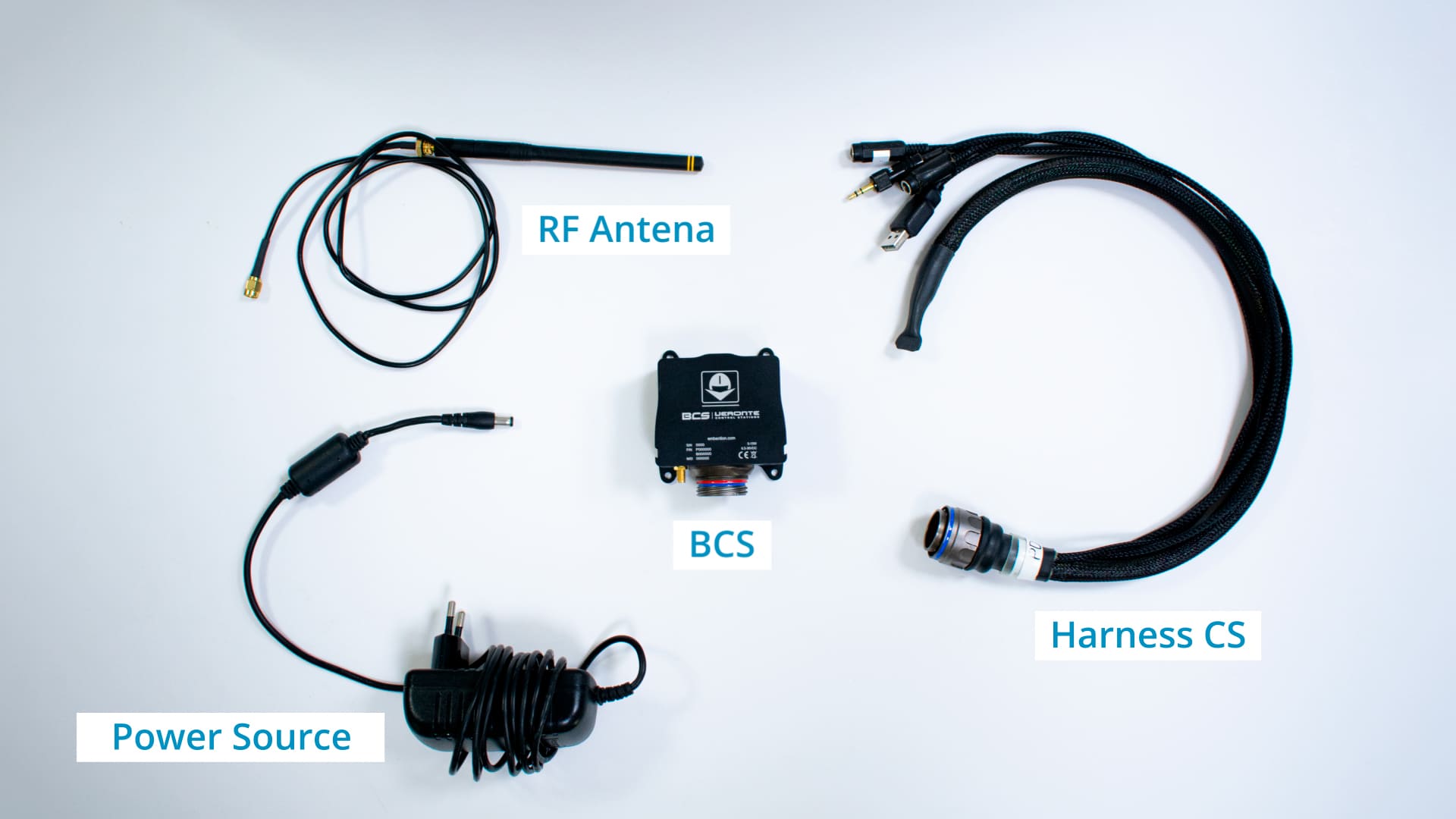
Basic operation elements¶
The steps described below cover the basic connection of a BCS for operation:


