Lidar Integration¶
Lidar Configuration¶
The integration between Veronte and Lidar is performed using the analog interface on the main connector which produces a voltage proportional to the measured altitude. In this example, a lightweight laser altimeter for above-ground level measurement (SF11) is configured.
You can get more information about our Lidar clicking here
Veronte configuration - ACD In¶
When Lidar connection to Veronte is performed, the autopilot configuration has to be completed (see section Connections). To do this, it is necessary to configure the operations to set the correct conversion from the voltage measurement to the physical variable.
Go to Variables/System Variables/Operations.
Configure the following operation, see section System Variables for more information on how to create a custom operation.
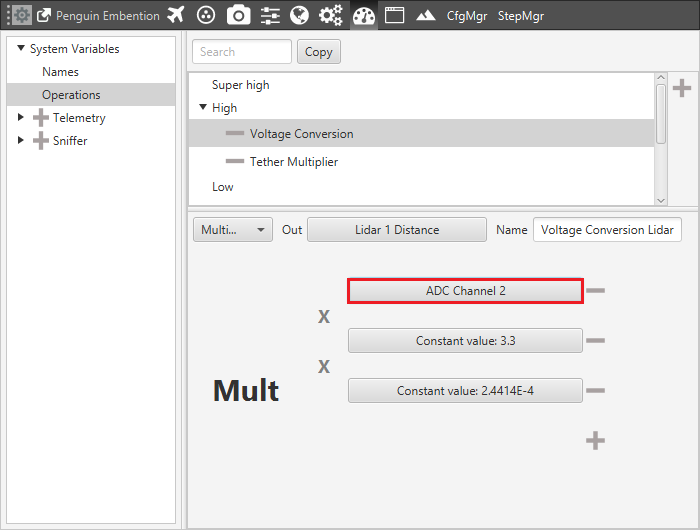
Lidar Configuration
Save the result of this linear operation in a variable (selected by the user), in this case Lidar 1 Distance [m].
Users have to select the ADC channel where the device is connected (ADC Channel 2-6), and set the previous operation that converts the voltage measured.
It is possible to create an alarm variable that will be triggered when the measured value is lower or greater than a fixed values, see section Gauge Display . For example, in this case, an alarm could be triggered when the measure is lower than 0 [m] or greater than 120 [m] meters (Lidar limits). The alarm is stored in a variable selected by the user (in this case, the alarm Power B error is used).
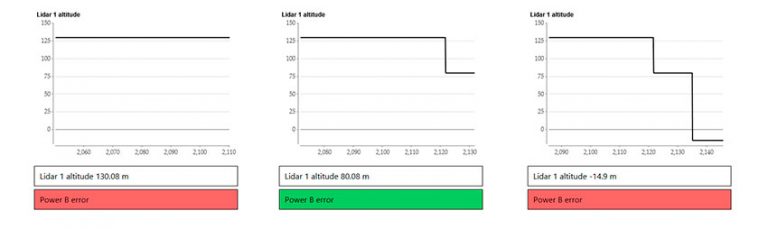
Lidar alarm example
Veronte Configuration - altimeter¶
The Altimeter configuration has to be defined in the Devices panel of Veronte (Devices > Sensors > Altimeter). Configuration tools are explained in section Altimeter but a good configuration for the SF11 Lidar is the one showed in the following figure.
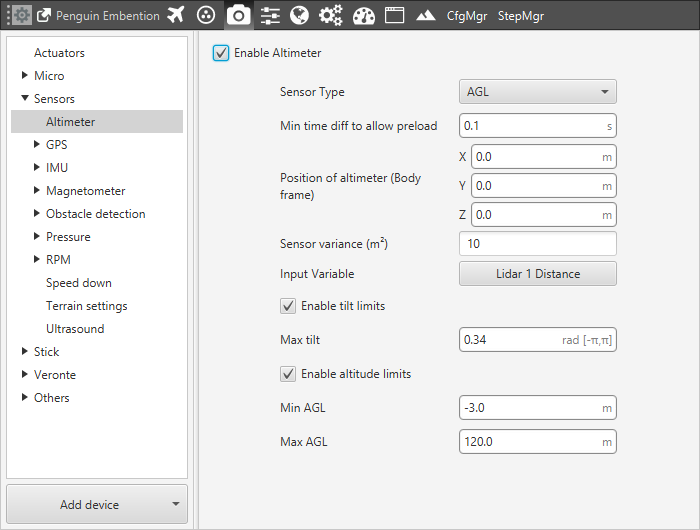
Altimeter configuration example
The following figure shows a diagram with the values of maximum and minimum Above Ground Level altimeter, and the maximum tilt angle.
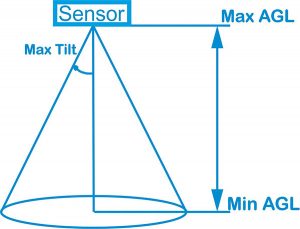
Payload limits
It is important to correctly define the distance of the altimeter from the gravity center and the AGL and Tilt angle limits in order to avoid a possible measurement errors.
It is possible to test the correct measurement of the Lidar by positioning it at different AGL altitudes and checking the associated variable in the workspace.