CEX CAN Setup¶
CAN Basic Setup¶
Main screen to configure bus speed and the reception mailboxes of each CAN bus:
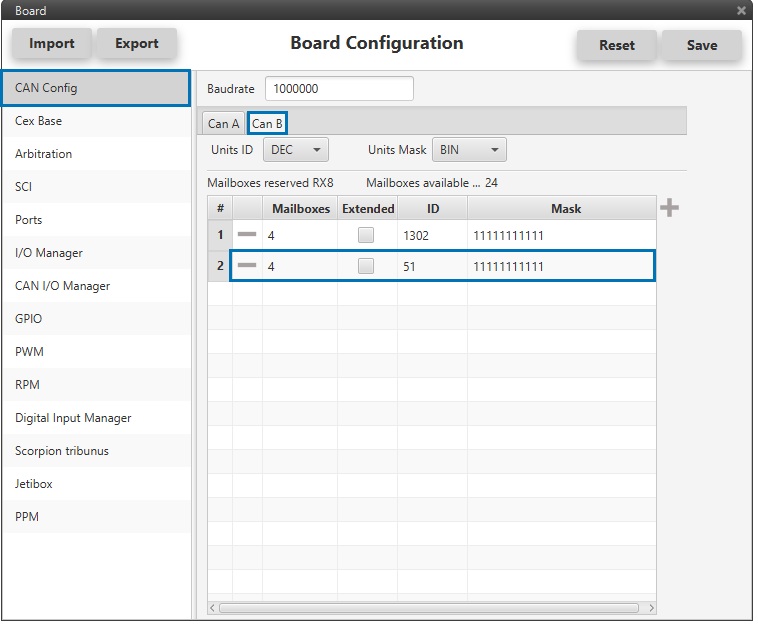
CAN BUS configuration
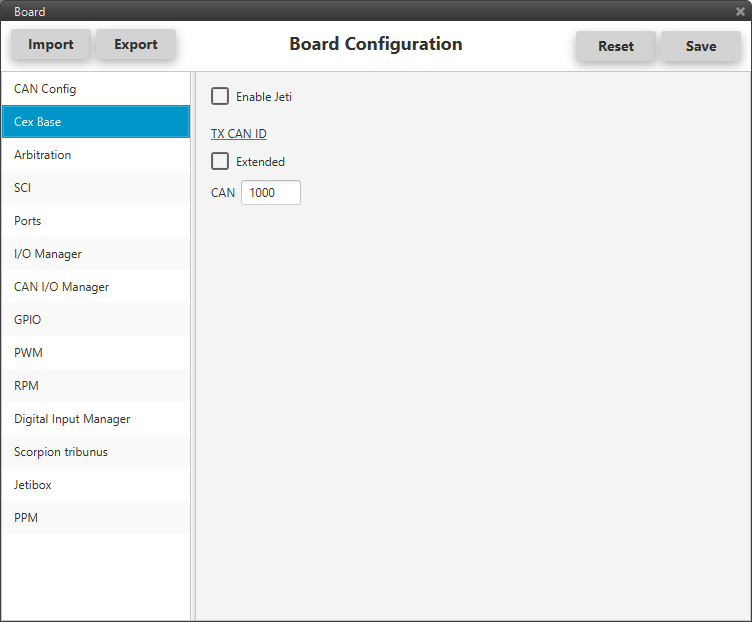
CEX CAN Transmission ID¶
CEX is able to send information about its version, Arbitration status (check the Arbiter manual for a description of these messages) and Jeti telemetry from devices connected to CEX. We can define the CAN Id used to those messages:
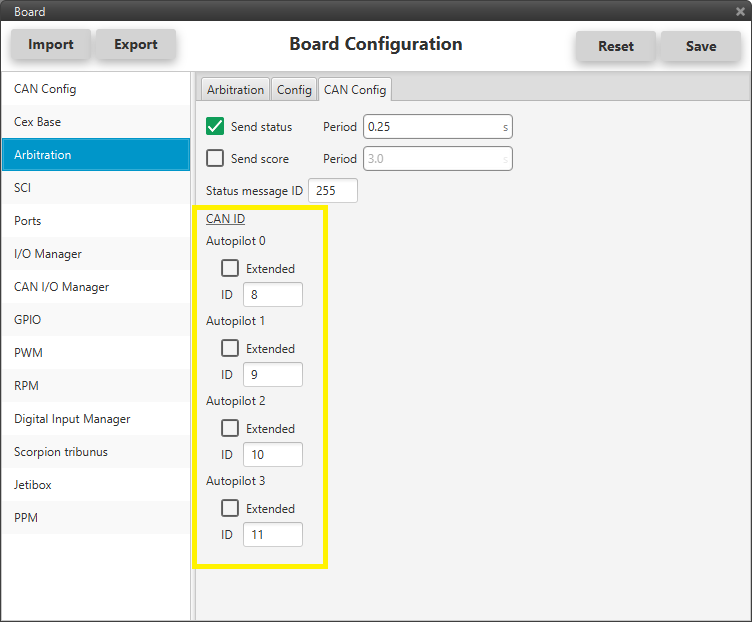
CAN Reception IDs¶
We CAN setup the recepcion CAN Ids for each of the 4 possible Veronte Autopilots sending data to CEX. If arbitration is not enabled, only the configuration of the Autopilot 0 will be used.
CAN I/O Interconnections¶
Once the CAN IDs are set, we shall configure:
The Input Filters going to be used.
The connection between input filters and data Consumers.
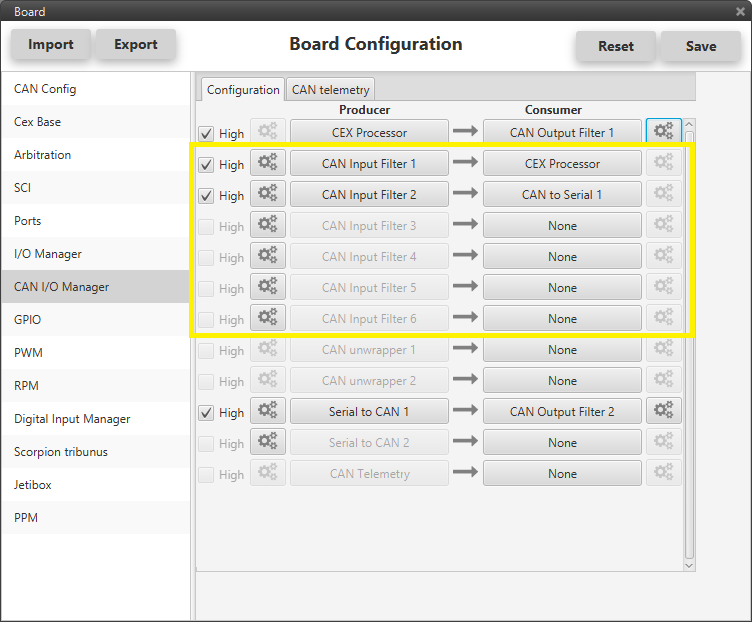
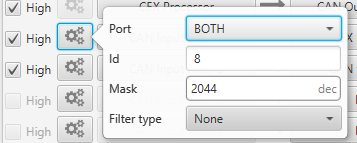
For each CAN Input Filter, it is requried to configure the can bus from which it listens (CAN-A, CAN-B or Both), the CAN id, the CAN Id mask and the type of frame (Standard, Extended or Both).
The Mask defines the bits that sould match. For example if we want to admit statndard Ids (11 bits) from 8 to 11 (100 to 111 in binary) we should set the mask to binary 11111111100, that is 2044 in decimal.
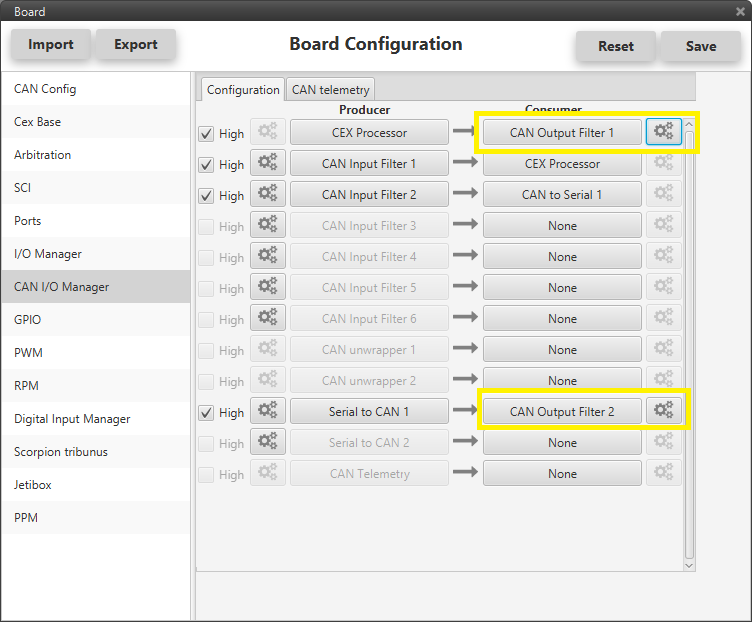
Next step is to connect each of the desired data Producers to an Output Filter, and configure both the Producer and the Output Filter:
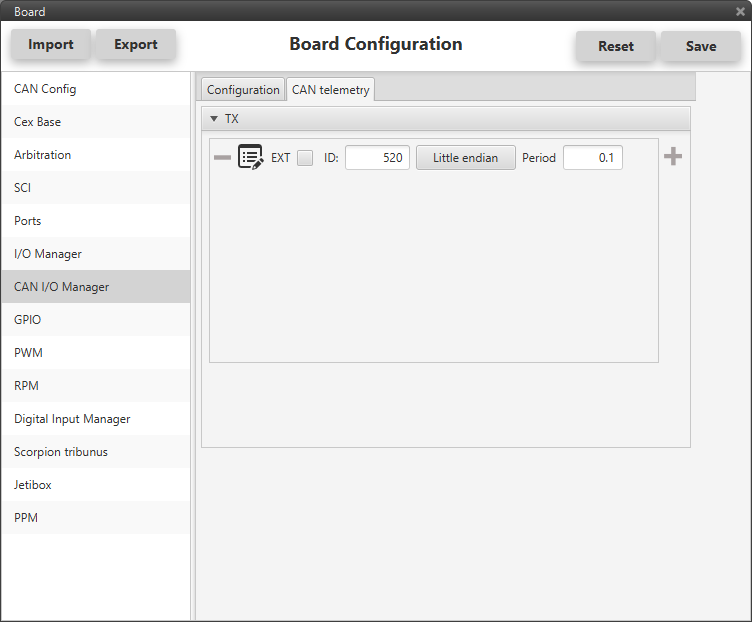
CAN Telemetry¶
CEX is able to send telemetry via CAN. To enable this feature CAN Telemetry producer shall:
Connect it to an Ouptut Filter as follows:
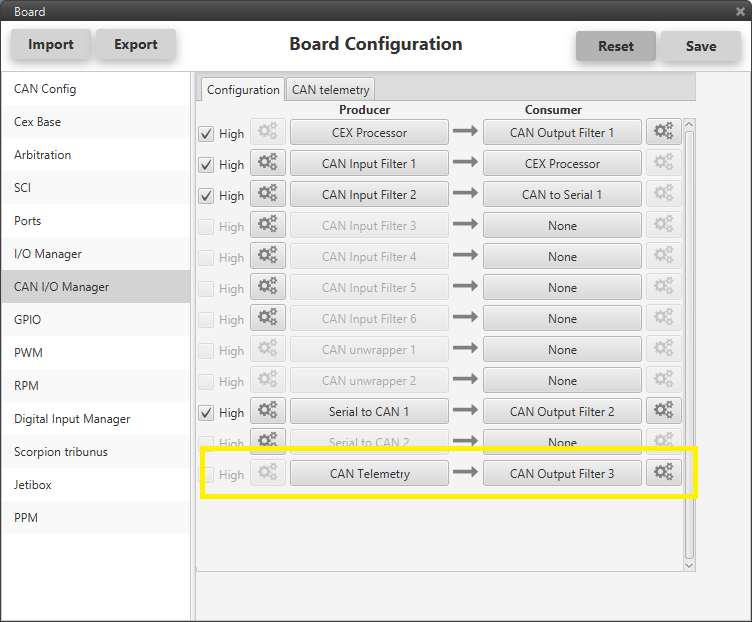
Select the fields to send in the Telemetry tab. Note that each message is limited to 64 bits and larger messages will be cut to that size.