Pre-flight Checklist¶
This section provides the necessary information on how to implement/prepare a pre-flight checklist. The latter will be sensitive to every vehicle and its mission. It is fundamental for the user to know the set of sensors and/or events that must be evaluated before allowing the vehicle to enter a ready-to-fly phase.
However, there is a set of critical parameters that should always be on the user’s checklist. There are others worth-considering too. Both of them will be introduced hereafter with detail on the implementation in Veronte Pipe.
Main Checklist¶
Within the software, it is possible to define a checklist for every phase created. Such checklist can be tailored so that if one item is not satisfactorily fulfiled upon phase changing, the vehicle won’t be able to swap to the desired/programmed phase.
These checklist are also helpful for the user to check relevant vairables when a phase change occurs. But for what it is concerned in this section, a checklist needs to be defined on the Precalibrate phase, i.e. the initial default phase of the autopilot.
Go to ![]() , then click on Setup. On the Setup toolbar then go to Panel
, then click on Setup. On the Setup toolbar then go to Panel ![]() . And finally click on Checklist. There the user should select the Precalibrate phase.
. And finally click on Checklist. There the user should select the Precalibrate phase.
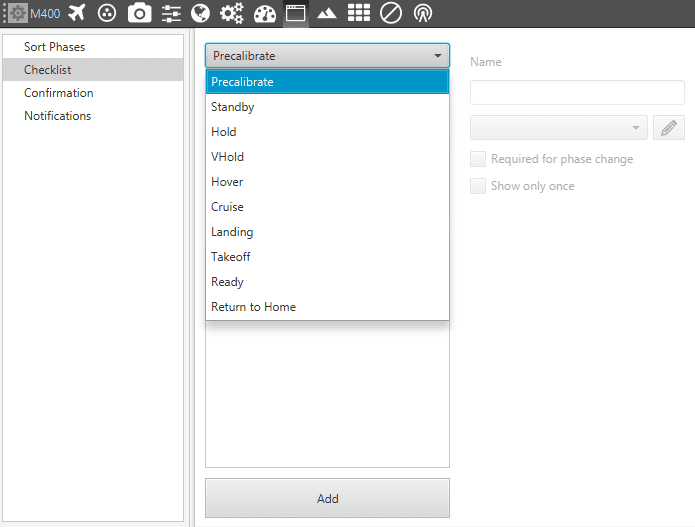
Panel Checklist – Precalibrate Phase
When creating a new element the user can select among many options: from commanding a certain action (position, yaw, etc), calibrating a sensor, to check that a variable or group of variables are within a range of values (see figure below). Then there are also the options “Required for phase change” and “Show only once”, which are self-explanatory. “Required for phase change” should be selected for every item as the user does not want to start the flight without this checklist completely verified.
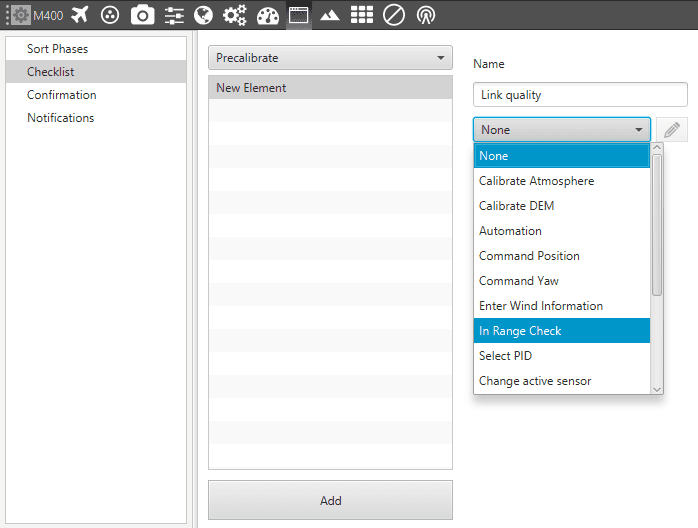
Options for New Element
The main checklist is composed of:
Link quality: radio connection from the GND unit to the AIR unit can be evaluated with 2 built-in variables. They measure the transmitting and receiving error rate, i.e. the percentage of messages that are not received or transmitted correctly. What is set is that this variables’ values shoud not be bigger than 0.7 (option “In Range Check”) and the option “Automatic Check” should be toggled so this is reviewed automatically (see the figure below).
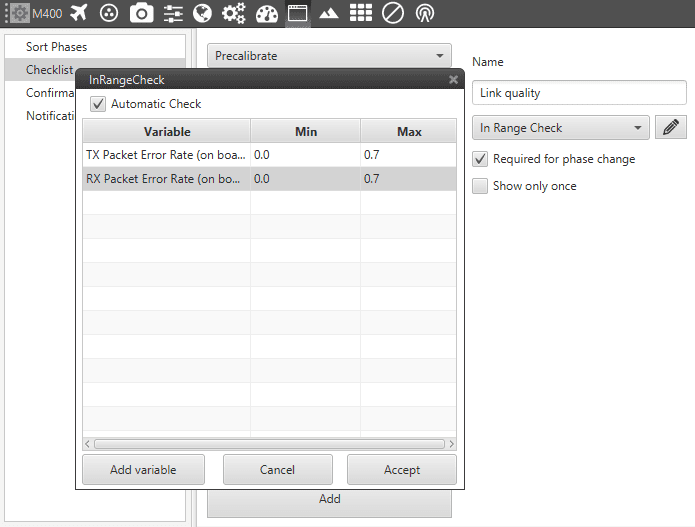
Link Quality Parameters
GPS signal OK: if the GPS module is not working correctly there is a boolean variable called “Position not fixed” that will be turned to 0. Therefore option “In Range Check” is selected with a value between 1 and 1, i.e. the boolean variable should be true. Option “Automatic Check” should also be toggled.
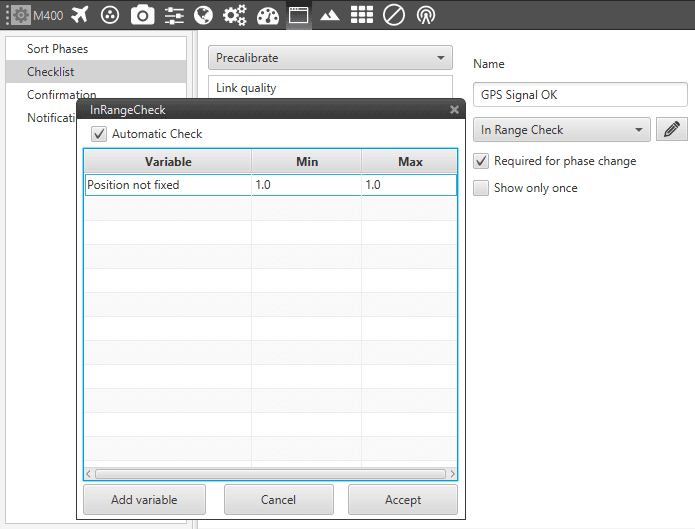
GPS Signal Parameters
Battery voltage / fuel volume: a system variable shoud be used to monitor the voltage of the battery of the amount of fuel left on the tank of the vehicle. Then, option “In Range Check” should be selected setting the range of possible values, e.g. 21 V and 25.2 V for 6 Cell LiPo Battery. Option “Automatic Check” should also be toggled.
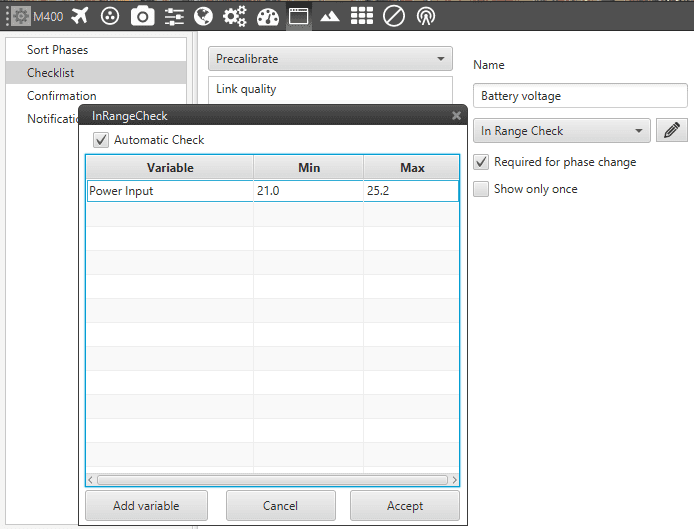
Battery Voltage Parameters
Sensors OK: there is a boolean variable that checks all the autopilot’s avialable sensors called “Sensors Error”. If any of the sensors is not working then this variable will be 0. Therefore option “In Range Check” is selected with a value between 1 and 1, i.e. the boolean variable should be true. Option “Automatic Check” should also be toggled.
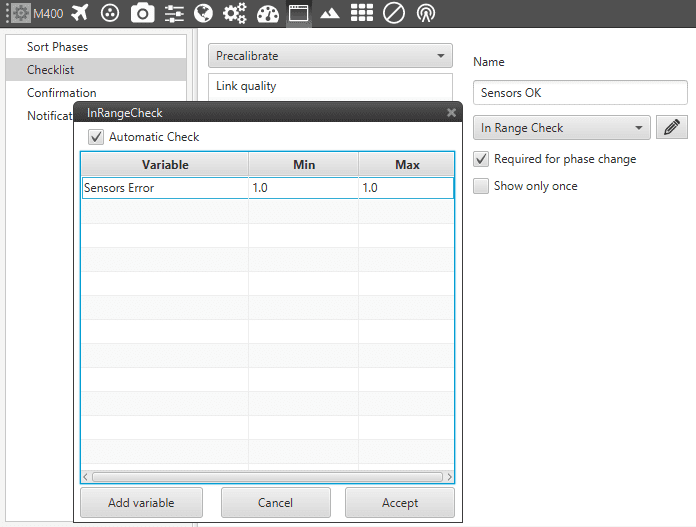
Sensors Checkup Parameters
Stick OK: there is a boolean variable that checks that there is an external transmitter connected to the GND autopilot. The latter is essential so the mission can be carried in “Manual mode” if ever necessary. The variable is called “Stick not detected” and if there’s no external transmitter connected it will be 0. Therefore option “In Range Check” is selected with a value between 1 and 1, i.e. the boolean variable should be true. Option “Automatic Check” should also be toggled.
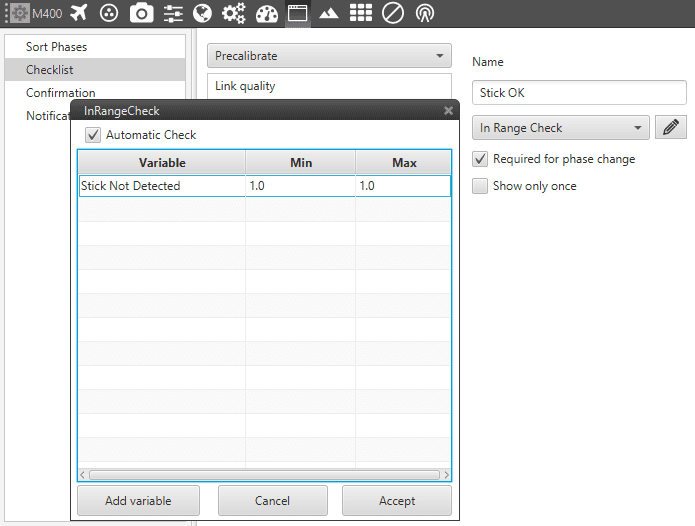
External Transmitter Parametters
Other Items¶
Other parameters worth-considering to be on the user’s checklist:
Terrain Mesh OK
Mission OK
Automations OK