I2C Devices¶
Warning
Be aware that custom messages are not available for I2C. Only the devices listed below can be integrated with Veronte Autopilot using the I2C interface.
The I2C bus allows the connection of several devices with different addresses to the same line via master-slave communication. At this moment, Veronte supports the following devices:
Garmin LIDAR-Lite v3. Optical distance measurement sensor with a range of 5cm to 40m.
SF11 Lidar. Long range laser altimeter. Supported SF11/B and SF11/C with a maximum range of 50m and 120m respectively.
Magnetometer LIS3MDL. Three-axis magnetic sensor with a very small package.
Magnetometer HSCDTD008A. Three-axis terrestrial magnetism sensor of the digital output.
Lidar Devices¶
Both Lidar must be configured in I2C Devices menu. In our case, Veronte allows up to 5 Lidar devices to be connected to the system at the same time.
The configuration menu can be seen below:
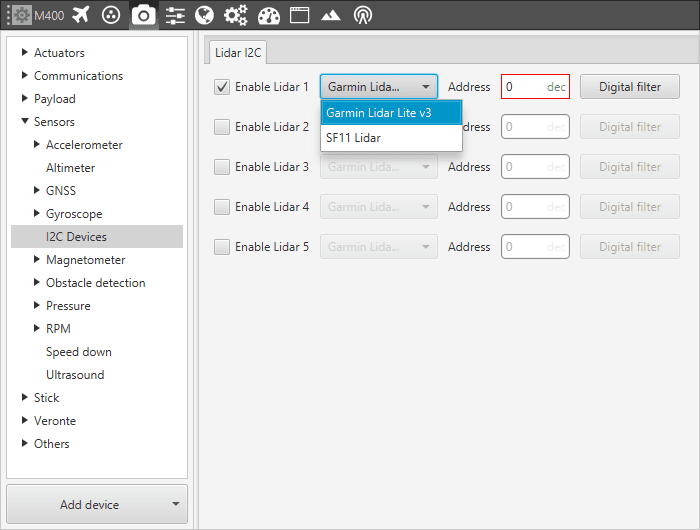
I2C - Configuration Menu
After enabling the needed number of Lidar devices, configurable parameters are:
Type of Lidar. Veronte is compatible with Garmin Lidar Lite v3 and SF11 Lidar.
Address. With an accepted value between 16 - 239, this is the origin address from the Lidar being configured.
Digital filter. Enables a low pass filter which its cutoff frequency is configured manually, allowing the user to input any desired value in Hz. It is a software filter.
The Lidar number need to be kept in order to properly configure the Altimeter menu afterwards in Setup - Devices - Sensors - Altimeter.
Magnetometer Devices¶
The magnetometers are configured in Setup - Devices - Sensors - Magnetometer. It is very important to know that address cannot be chosen in the software and must be as follows:
Magnetometer LIS3MDL: 0x1C.
Magnetometer HSCDTD008A: 0x0C.
In order to select a magnetometer connected by I2C bus, the user simply has to select it in the configuration menu (see the figure below):
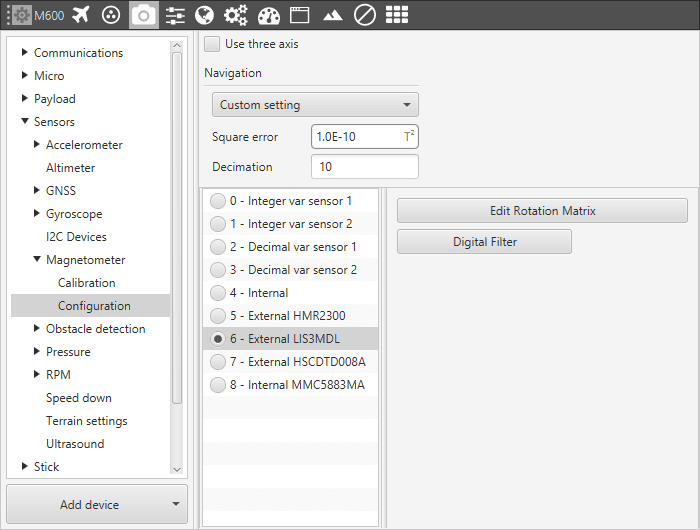
I2C - Magnetometer Configuration
Once the magnetometer is chosen, the user can modify the following parameters:
Rotation matrix. It must be modified in the case that the axes of the magnetometer do not coincide with those of the aircraft.
Digital filter. Enables a low pass filter which its cutoff frequency is configured manually, allowing the user to input any desired value in Hz. It is a software filter.