Quadcopter Example¶
In this section a basic example about how make an airframe model is shown.
In the picture below this is represented. Once Veronte receives all the sensor information, the autopilot computes the guidance and control algorithms. As a result, the autopilot computes the necessary value for servos. The inputs of the system are the values of the PWM, it means, servos output (pin 2). User also can use the control output value directly. These values have to be entered in a user function that computes the airframe model. However, these values are the current ones. To perform a properly simulation the input values must be those from the previous step. It can be solved with the memory block (stored previous step input).
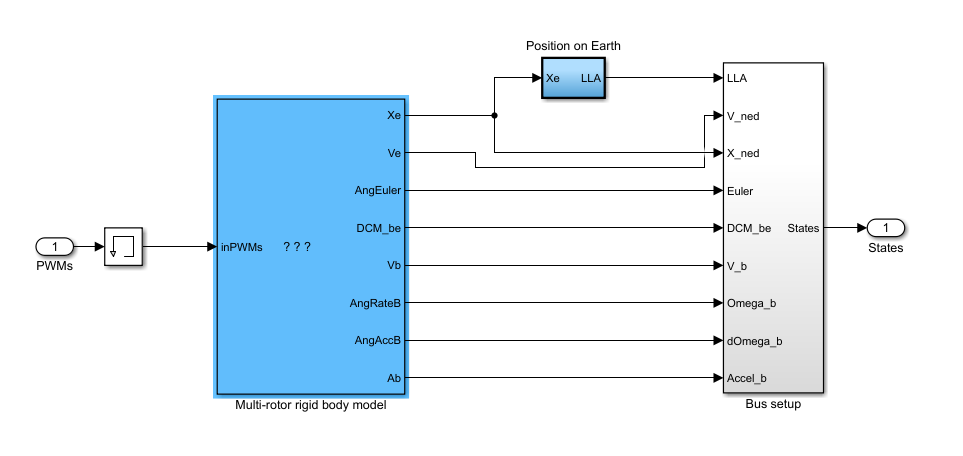
Complete Setup Example
In this example, the value of PWM is transformed to RPM. For this, it is necessary to implement an engine/rotor model, for example, by using a Transfer function (power unit model).
Transfer function
Once the RPM are calculated, the aerodynamic forces and moments can be computed with a properly model. Then this forces are entered to the Rigid Body model to integrate the vehicule state.
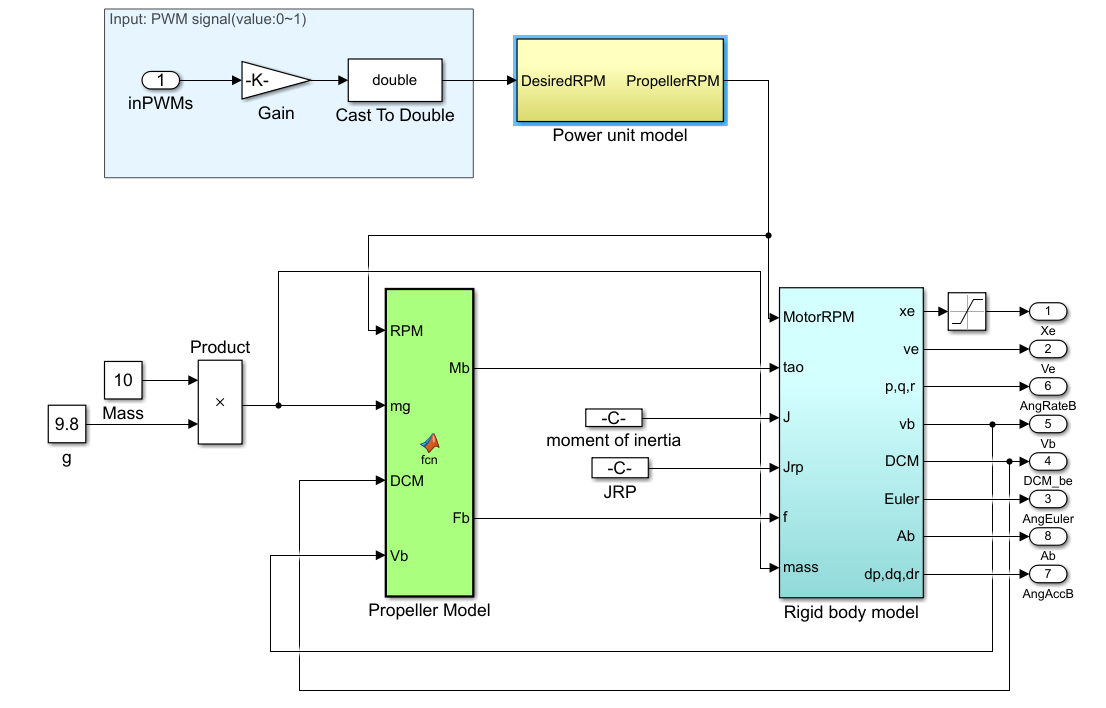
Airframe model