Pressure sensors¶
Static Pressure¶
Static Pressure inputs in the S-Function simulate the internal ones in Veronte Autopilot 1x. The required information consists of raw measurements and the sensor device temperature.
The S-Function has 3 ports which correspond to the sensors that would be installed in Autopilot 1x. The port (or ports) receiving the raw static pressure should be that which matches the static pressure sensor selected in the simulated autopilot’s PDI configuration (modified through the 1x PDI Builder software).
In the following table, the user can consult the static pressure sensors available for each hardware version:
Hardware version |
S-Function Input |
1x PDI Builder equivalence |
|
|---|---|---|---|
PIN |
Description |
||
4.0 |
1 |
Static Pressure 1 |
0 - Internal 0 |
2 |
Static Pressure 2 |
1 - Internal 1 |
|
4.5 |
1 |
Static Pressure 1 |
0 - Internal 0 |
2 |
Static Pressure 2 |
1 - Internal 1 |
|
3 |
Static Pressure 3 |
2 - Internal 2 |
|
4.8 |
2 |
Static Pressure 2 |
1 - Internal 1 |
3 |
Static Pressure 3 |
2 - Internal 2 |
|
Note
There may be inputs (ports) not connected since the S-Function contains the maximum number of possible inputs for the different hardware versions, as can be seen in the aforementioned table.
Below are some examples of how to implement the static pressure:
Constant value
Only one block constant for raw pressure and one for temperature.
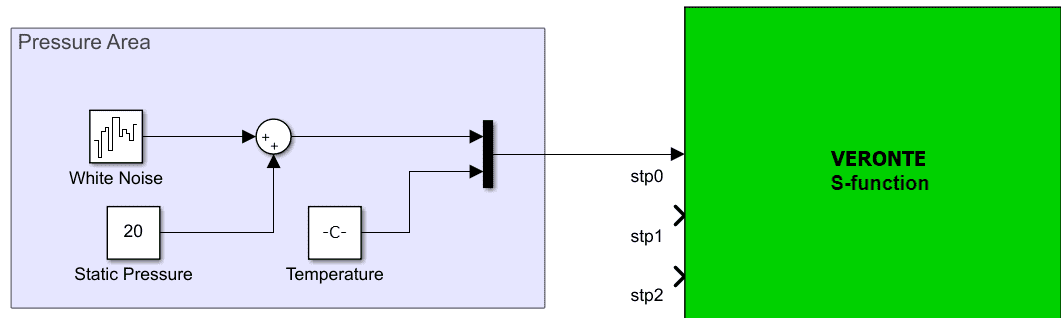
Static pressure - Constant¶
Step
If users wish to simulate a leap in pressure measurements, it is possible to add a step to the previous configuration. In the example below a difference in 100 meters is represented.
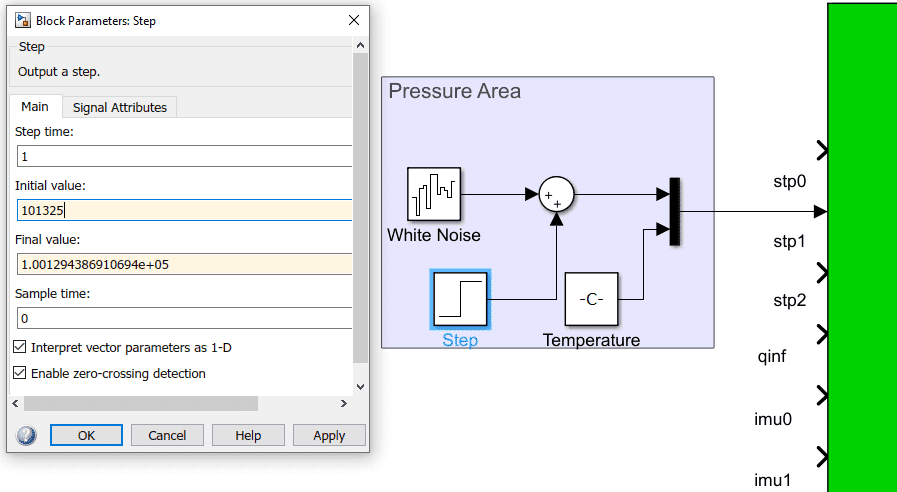
Static pressure - Step input¶
Important
Note that in both examples a White Noise block has been added.
Dynamic Pressure¶
The dynamic or velocity pressure input requires the raw measurement of dynamic pressure and sensor device temperature.
Some examples of how to implement dynamic pressure are shown below:
Constant value
As the raw measurement of dynamic pressure has been added as a constant, a white noise block is also added:
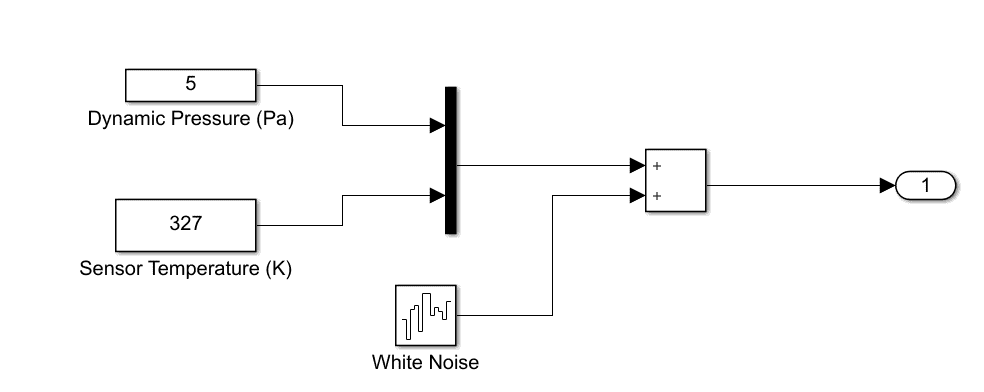
Dynamic pressure - Constant¶
Complex model
In this example, Autopilot 1x is assumed to be mounted on the X-axis in Body rame. Therefore, from the velocity in NED frames, a rotation is applied to obtain the velocity in Body frames, and then the first component of the vector is taken.
In addition, the density value is taken from the environment model.
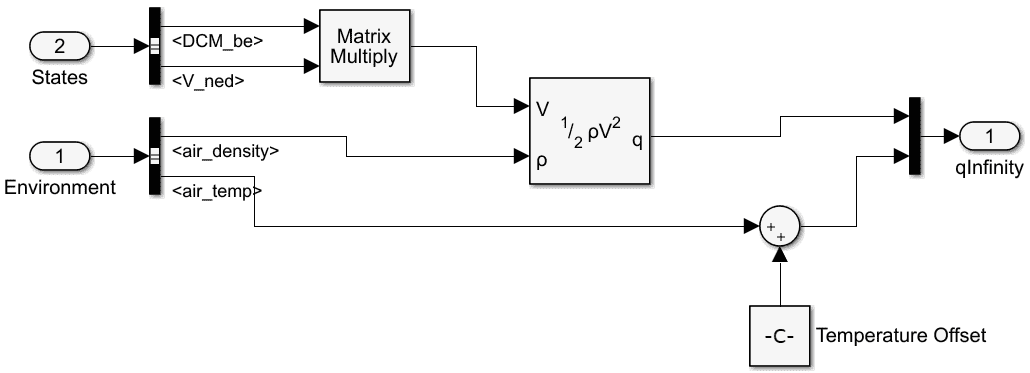
Dynamic Pressure - Subsystem¶