Introduction¶
SIL Simulator software acts as a ‘virtual Autopilot 1x’, providing a realistic simulation experience for testing and development purposes.

The essence of SIL Simulator lies in its capacity to replicate Autopilot 1x behavior through the utilization of a dynamic-link library (DLL) embedded with Veronte Autopilot 1x code, Veronte DLL.
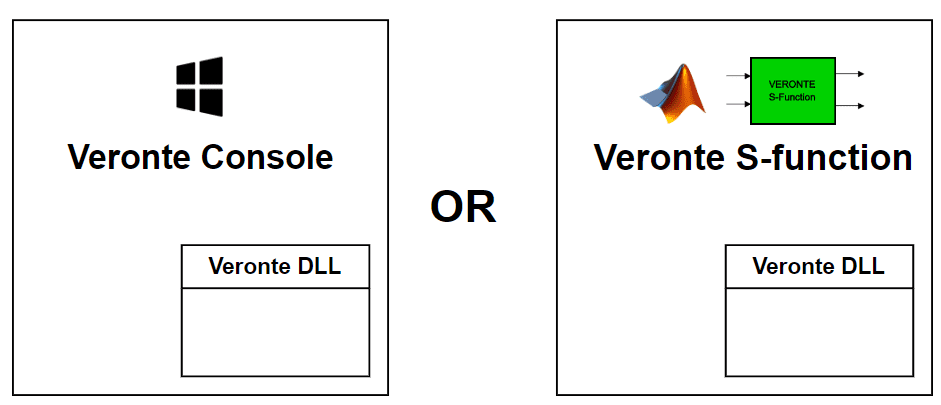
This code can simulate the physical autopilot firmware through two primary interfaces, Veronte Console or Simulink workspace (by means of the Veronte S-Function block). To suit customer preferences, Veronte DLL could also be run with other languages, such as Python. However, this integration must be undertaken independently by clients.
SIL Simulator interfaces¶
Error
Running Veronte DLL with Veronte Console and Simulink workspace simuntaneaously will interfere with the functioning of the system, causing the simulation not to work.
Veronte Console¶
Veronte Console is a Windows executable that allows to simulate the ‘virtual Autopilot 1x’ (VeronteDLL).
Through this simulation option, users can employ Veronte applications with the simulated autopilot. However, at present, the main difference with Veronte S-Function is that inputs cannot be emulated in this simulation option.
Veronte S-Function¶
Veronte S-Function consists of a Simulink block which can be integrated in a Simulink model to virtually simulate the behavior of Veronte Autopilot 1x in a customized environment.
In the workspace of Simulink, users can design the dynamic model of their own aircraft, the desired input signals of the system, and therefore, analyse the response of the provided virtual autopilot in a emulated environment.
Note
Signal conditioning and calculation depend on the aircraft to simulate and the purpose of the simulation. Users must program their own Simulink workspace accordingly to these considerations.
SIL has several advantages when compared to a HIL Simulator setup:
Complete simulations without any hardware.
Possibility to use the user’s vehicle model: users can define the dynamics of their vehicle (with the desired complexity) without the need to use external programs, such as Plane Maker.
Possibility to simulate different types of sensors even if they are not installed in Veronte Autopilot 1x. All that is needed is the raw sensor reading.
All results can be exported/visualized to MATLAB workspace simultaneously.
Veronte Autopilot 1x blocks run faster than real-time, allowing the user to execute a series of simulations in a short time. This feature depends on the complexity of the model and the capability of the computer where the simulation is running.