Static Pressure¶
Static Pressure inputs in S-function simulate the real ones in Veronte. The information required consists of raw measurements and the sensor device temperature. The S-function contains 3 ports as the autopilot hardware. Then this information should be used according to the static pressure sensor selected in the configuration.
Normally the same information should feed the 3 ports, althougth you can simulate that one of them is not working properly.
Some examples of how implement the static pressure are shown below:
Constant value¶
Only a block constant for raw pressure and another for temperature. Also it is possible to add some white noise.
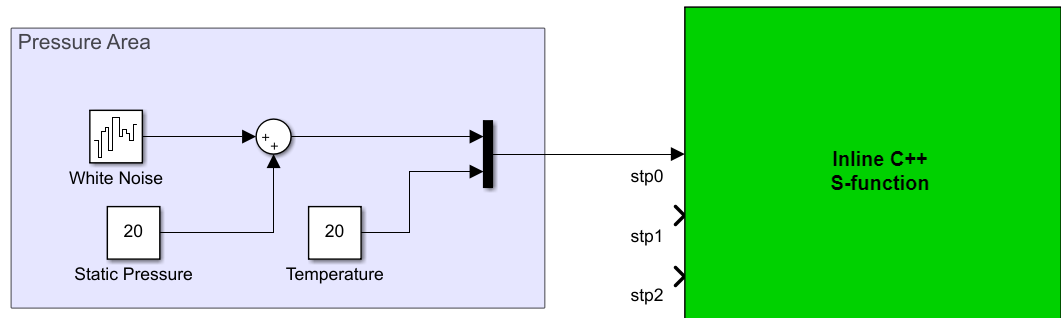
Constant pressure
Step¶
If you want to simulate a leap in pressure measurements you can add a step to the previous configuration. In the example below a difference in 100 meters is represented.
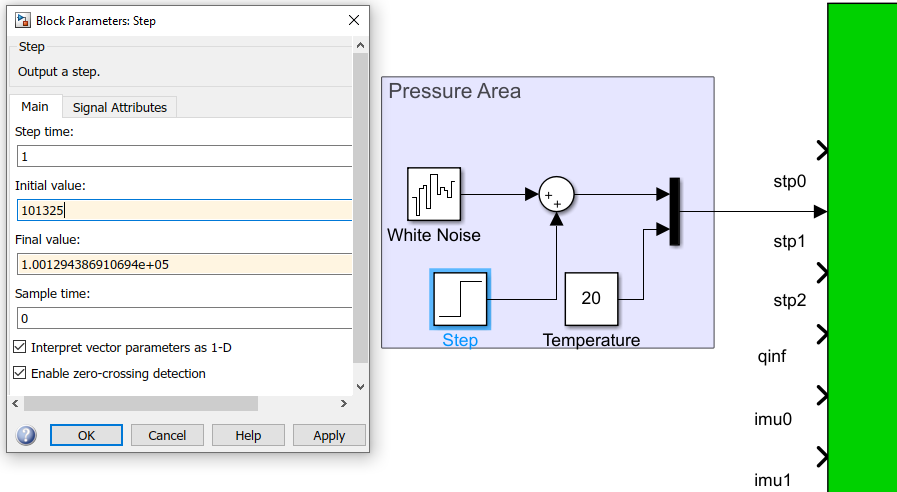
Step input in pressure
Variable pressure¶
If you want a more accurate model which modify this value according to vehicle position you need to enter pressure information from the environment block. This block is necessary when user is simulating movement because pressure is an input to the fusion algortihms (Ex.:Kalman filter). You had to select the raw measurement and the temperature from the bus that cointains all the atmosphere properties.
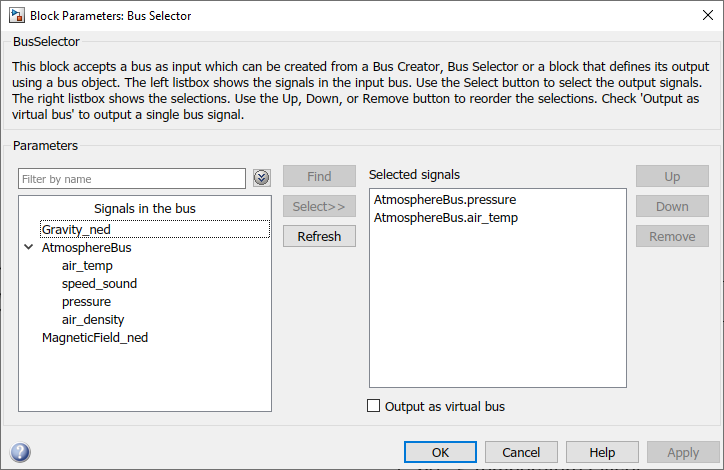
Selecting environment variables
Finally, the complete group results as the image below. The temperature is compute as the ambient temperature plus an offset.
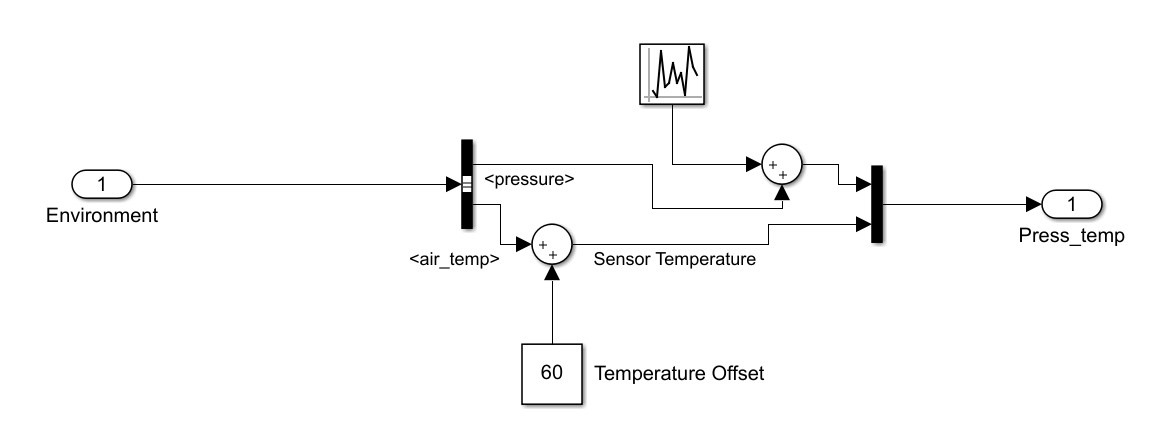
Variable pressure