Tuning
To achieve precise and efficient motor control, the MC110 uses a strategy known as Field-Oriented Control (FOC). The following block diagram illustrates this workflow.
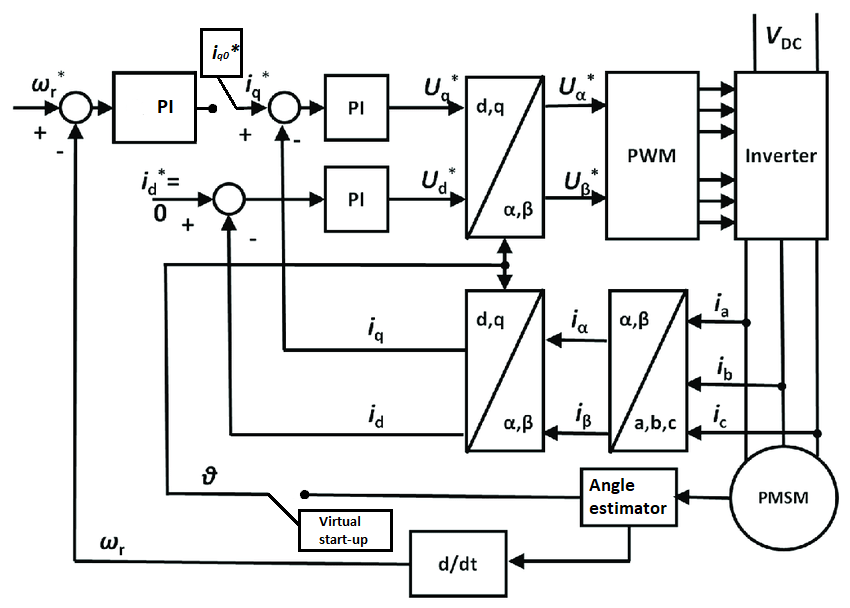
As seen in the block diagram, there is a switch (that is optional) that defines two positions and that will determine the open or closed loop of the speed control. This is done because at startup, the estimator block (sometimes) is not capable of correctly calculating the position/speed of the motor at low speed, so there is a special startup configuration, in which a known speed ramp is commanded and the angle is calculated.
Looking at the block diagram, the blocks to be tuned are:
- Motor characterization → Motor panel.
- Open loop start-up (if it is active) → Open Loop Startup panel.
- Angle estimator (sensor, or failing that, observer). → Observer panel.
- Quadrature current → Quadrature Current Controller.
- Direct current → Direct Controller.
- Speed → Speed Controller.
© 2025 Embention. All rights reserved.