Quick Start¶
Veronte Gimbal 10z is moved and visualized using a Veronte Autopilot 1x. The Autopilot 1x that controls the aircraft can be configured to control and visualize Gimbal 10z cameras.
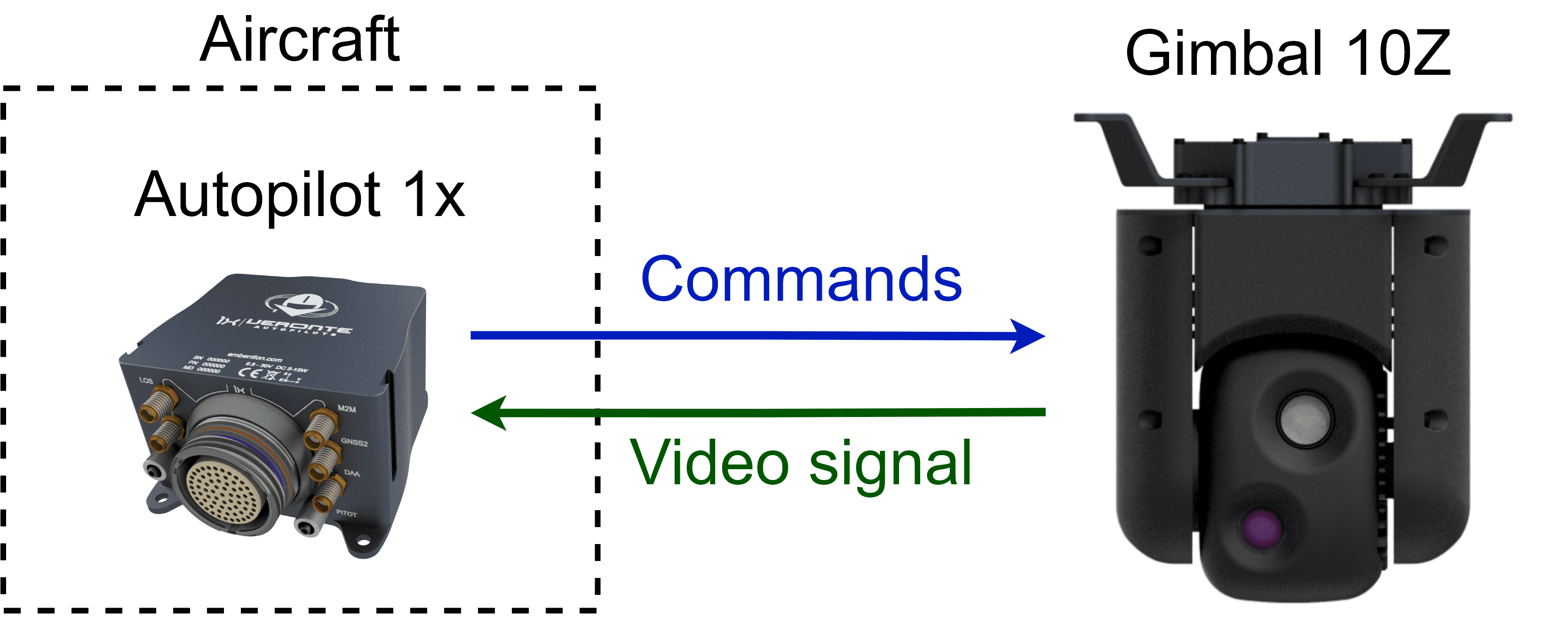
System Overview¶
First of all, configure the Autopilot 1x according to the Software installation section , then the Hardware installation section provides instructions on how to physically install the Gimbal 10z.
Requirements¶
A Veronte Autopilot 1x to command and visualize 10z.
Power supply of 24 V DC.
Veronte Gimbal 10z has not an internal resistor for CAN bus, in case that the Gimbal is at the end of the bus, please place a 120 \(\Omega\) resistor externally
A device with ethernet port to receive video signals.
A frame with four screwed holes for M4 screws, read Mechanical Assembly for more information.